跟着机器人技能的不断发展,机器人的使用领域和功用有了极大的拓宽和进步。智能化已成为机器人技能的发展趋势,而传感器 技能则是完结机器人智能化的根底之一。因为单一传感器取得的信息十分有限,并且,还要遭到自身质量和功用的影响,因而,智能机器人一般配有数量许多的不同类型的传感器,以满意勘探和数据收集的需求。若对各传感器收集的信息进行独自、孤立地处理,不只会导致信息处理作业量的添加,并且,割断了各传感器信息间的内在联系,丢掉了信息经有机组合后或许包含的有关环境特征,构成信息资源的糟蹋,乃至或许导致决议计划失误。为了处理上述问题人们提出了多传感器交融技能(multi-sensorfusion)。
技能则是完结机器人智能化的根底之一。因为单一传感器取得的信息十分有限,并且,还要遭到自身质量和功用的影响,因而,智能机器人一般配有数量许多的不同类型的传感器,以满意勘探和数据收集的需求。若对各传感器收集的信息进行独自、孤立地处理,不只会导致信息处理作业量的添加,并且,割断了各传感器信息间的内在联系,丢掉了信息经有机组合后或许包含的有关环境特征,构成信息资源的糟蹋,乃至或许导致决议计划失误。为了处理上述问题人们提出了多传感器交融技能(multi-sensorfusion)。
概述
多传感器交融又称多传感器信息交融(multi-sensor information fusion),有时也称作多传感器数据交融(multi-sensor data fusion),于1973年在美国国防部赞助开发的声纳信号处理体系中被初次提出,它是对多种信息的获取、表明及其内在联系进行归纳处理和优化的技能。它从多信息的视角进行处理及归纳,得到各种信息的内在联系和规矩,然后除掉无用的和过错的信息,保存正确的和有用的成分,终究完结信息的优化,也为智能信息处理技能的研讨供给了新的观念。
多传感器交融的层次结构
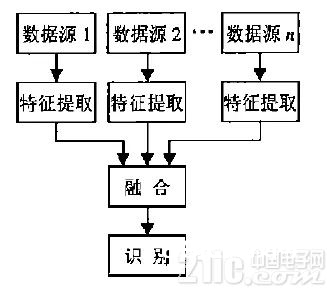
多传感器交融在结构上按其在交融体系中信息处理的笼统程度,首要划分为三个层次:数据层交融、特征层交融和决议计划层交融。
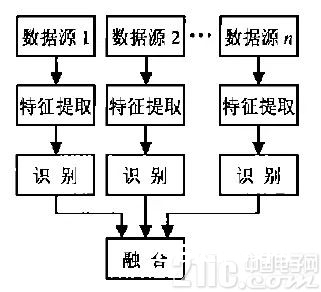
1.数据层交融:也称像素级交融,首先将传感器的观测数据交融,然后从交融的数据中提取特征向量,并进行判别辨认。数据层交融需求传感器是同质的(传感器观测的是同一物理现象),假如多个传感器是异质的(观测的不是同一个物理量),那么数据只能在特征层或决议计划层进行交融。数据层交融不存在数据丢掉的问题,得到的成果也是最精确的,但核算量大,且对体系通讯带宽的要求很高。

2.特征层交融:特征层交融归于中心层次,先从每种传感器供给的观测数据中提取的有代表性的特征,这些特征交融成单一的特征向量,然后运用形式辨认的办法进行处理。这种办法的核算量及对通讯带宽的要求相对下降,但因为部分数据的放弃使其精确性有所下降。
3.决议计划层交融:决议计划层交融归于高层次的交融,因为对传感器的数据进行了浓缩,这种办法发生的成果相对而言最不精确,但它的核算量及对通讯带宽的要求最低。
关于特定的多传感器交融体系工程使用,应归纳考虑传感器的功用、体系的核算才能、通讯带宽、希望的精确率以及资金才能等要素,以确认哪种层次是最优的。别的,在一个体系中,也或许一起在不同的交融层次上进行交融。

多传感器交融的算法
交融算法是交融处理的根底。它是将多元输入数据依据信息交融的功用要求,在不同交融层次上选用不同的数学办法,对数据进行归纳处理,终究完结交融。现在已有许多的交融算法,它们都有各自的优缺点。这些交融算法整体上法能够分为三大类型:嵌入束缚法、依据组合法、人工神经网络法。
1.嵌入束缚法
由多种传感器所取得的客观环境的多组数据便是客观环境依照某种映射联系构成的像,传感器信息交融便是经过像求解原像,即对客观环境加以了解。用数学言语描绘便是,即便一切传感器的悉数信息,也只能描绘环境的某些方面的特征,而具有这些特征的环境却有许多,要使一组数据对应专一的环境(即上述映射为逐个映射),就必须对映射的原像和映射自身加束缚条件,使问题能有专一的解。嵌入束缚法有两种根本的办法:贝叶斯估量和卡尔曼滤波。
2.依据组合法
依据组合法以为完结某项智能使命是依据有关环境某方面的信息做出几种或许的决议计划,而多传感器数据信息在必定程度上反映环境这方面的状况。因而,剖析每一数据作为支撑某种决议计划依据的支撑程度,并将不同传感器数据的支撑程度进行组合,即依据组合,剖析得出现有组合依据支撑程度最大的决议计划作为信息交融的成果。
依据组合法是为完结某一使命的需求而处理多种传感器的数据信息。它先对单个传感器数据信息每种或许决议计划的支撑程度给出衡量(即数据信息作为依据对决议计划的支撑程度),再寻觅一种依据组合办法或规矩,使在已知两个不同传感器数据(即依据)对决议计划的别离支撑程度时,经过重复运用组合规矩,终究得出整体数据信息的联合体对某决议计划总的支撑程度,得到最大依据支撑决议计划,即传感器信息交融的成果。
常用的依据组合办法有:概率计算办法、D-S(Dempster-Shafer)依据推理法。

3.人工神经网络法
人工神经网络经过仿照人脑的结构和作业原理,规划和树立相应的机器和模型并完结必定的智能使命。神经网络依据当时体系所接收到的样本的相似性,确认分类规范。这种确认办法首要体现在网络权值散布上,一起可选用神经网络特定的学习算法来获取常识,得到不确认性推理机制。选用神经网络法的多传感器信息交融,分三个首要进程:
(1).依据智能体系要求及传感器信息交融的方式,挑选其拓扑结构;
(2).各传感器的输入信息归纳处理为一整体输入函数,并将此函数映射界说为相关单元的映射函数,经过神经网络与环境的交互作用把环境的计算规矩反映网络自身的结构;
(3).对传感器输出信息进行学习、了解,确认权值的分配,进而对输入形式作出解说,将输入数据向量转换成高档逻辑(符号)概念。

远景展望
在多传感器交融技能中,交融结构、交融算法都占有重要位置。跟着多传感器交融研讨与使用的深化,未来的多传感器交融将会是一个愈加杂乱的信息处理进程,不只包含许多详细的算法,并且结构也比较杂乱。怎么依据实践使用将算法与结构有机地结合在一起,为整个交融体系供给愈加有用的交融战略,这是未来多传感器交融研讨所要处理的首要问题。现在已有许多的交融算法,它们都存在各自的优缺点,需求经过合理的交融结构将这些算法组合在一起,使其取长补短,构成愈加有用的交融办法。别的,多传感器交融还将面对一个难题,那便是动态与不知道环境下的交融问题,这无疑会对交融办法提出更高的要求。这不只需求功用更好的交融算法,并且需求愈加灵敏的交融结构,进步交融体系的自适应性和鲁棒性。