摘要:文中规划的无刷直流电机操控体系挑选ATmega128单片机作为主控芯片,运用了EDA工具软件Proteus规划了无刷直流电机的操控体系,并进行了仿真试验。在仿真试验中运用Proteus软件的仿真功用,进行了电机转速操控的试验,操控体系的可行性以及转速操控效果得到了验证。试验过程中能直观地看到试验成果,所规划的体系满意了无刷直流电机转速操控的要求,电机运转安稳,在硬件电路和软件规划都有必定的辅佐效果。
关键词:Proteus;AVR单片机;无刷直流电机;仿真;操控体系
永磁无刷直流电动机不运用电刷和换向器组成的机械换向组织而是运用电子的直流电动机。永磁无刷直流电机首要不会呈现比如电刷引起的冲突和电火花、因机械换相组织而导致的寿命短等问题;其次无刷直流电机在结构上有必定的简化,转子上装置永磁体,定子上装置电枢绕组,因此在导热方面效果更好。这样既能坚持直流电动机在发动和调速方面的超卓特性,一起又在运转安稳性和能量转化功率等方面坚持必定的优势,从而进步电机运转的经济性。单片机虽然在性能上不如DSP芯片,但却有更低的价格,外部电路规划简略,在一般状况下单片机的操控功用和处理速度也可以到达的需求,所以这儿挑选单片机作为直流无刷电机驱动操控体系的主控芯片。
Proteus软件现在在单片机仿真及其他相关的外围器材的仿真方面,Proteus是一个十分有用的工具软件。可以运用Proteus完结硬件电路的规划,可以对单片机在内的一些微处理器进行编程,在微处理器上完成不同的操控算法,而且仿真过程中的操控效果可以直观观测。文中选用Proteus仿真渠道规划了以AVR单片机为操控中心的无刷直流电机仿真操控器,把有用的理论实践根底运用到实践体系的规划傍边。
1 Proteus中的无刷直流电机模型
无刷直流电机模型是在直流电机模型根底之上树立的,依据运用需求可在Proteus软件中对电机的参数进行设定,包括电机的额外运用电压、空载状况转速、转子的转动惯量、定子绕组的阻抗及定子绕组间的互感等参数。软件供给定子绕组为星型衔接(STAR)和三角形衔接(TRIANGIE)两种模型,在此选用星型衔接的无刷直流电机模型,该电机模型中自带有3个霍尔方位传感器,用于转子方位的检测。
2 硬件电路规划
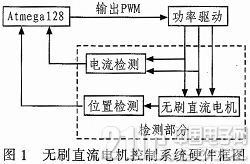
硬件电路首要包括单片机的硬件电路、电机的驱动电路、功率逆变电路、运转电流检测电路、转速检测电路等。原理框图如图1所示。
2.1 主操控电路
主控芯片挑选ATmega128单片机,电路如图2所示。ATmega128芯片选用RISC结构,安稳性高,运用广泛。其外设具有6路分辨率可编程 (2~16位)的PWM,8路10位ADC。其具有的功用可用于无刷直流电机的驱动操控。ATmega128芯片具有输入捕获功用,能检测到来自的外部中止信号。将电机模型中自带的霍尔方位传感器A.B,C别离接入单片机的PD0,PD1,PD2引脚,跟着电机转子方位的改动,3个霍尔传感器会输出不同的电平信号。当产生中止时,单片机的输入引脚可读取来自霍尔传感器的电平状况,在查询对应的霍尔换相真值表后即可得到当时的换相信息,从而完成换相操控。

2.2 功率驱动电路
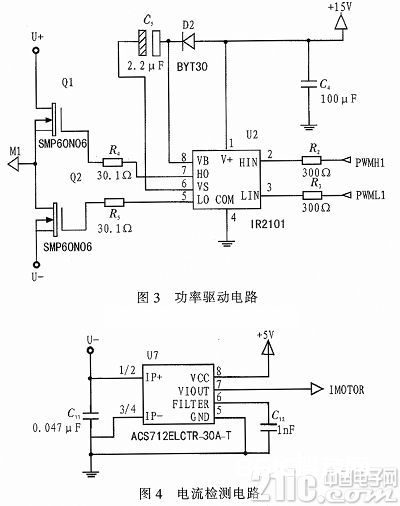
无刷直流电机的功率驱动如选用三相半桥方法,其电路部分器材相对较少,电机绕组的任一相只靠一个功率管即可操控电流转断,每相绕组的通电时刻与关断时刻之比为1:2,这使得每相绕组的运用率不高。三相全桥的电路部分器材的数量上是半桥式的两倍,但每相绕组可通电240°电视点,绕组运用率相应得到很大进步。三相桥式逆变器是由6个N沟道功率MOSFET管构成。IR2101是双通道、栅极驱动、高压高速功率驱动器,由于IR2101选用了高度集成的电平转化技能,使逻辑电路对功率器材的操控要求得到简化。功率MOSFET管选用二二导通方法,6个功率管在电机运转过程中的通断状况共有6个。图3所示的功率驱动电路是其间一相绕组对应的桥臂。主操控器输出的PWM脉冲方波别离加载到功率驱动芯片IR2101的HIN和LIN引脚,用于驱动相应功率 MOSFET管的通断。
2.3 相电流检测电路
为了检测相电流,挑选ACS712ELCTR-30A-T串入全桥公共端,然后将VIOUT端与主控芯片的A/D输入端口PF0衔接。 ACS712是线性电流传感器,该器材内置有准确的低偏置的线性霍尔传感器电路,其输出电压与被检测电流成份额。ACS712ELCTR-30A-T霍尔电流传感器输出规模是0.5~4.5 V,而主控芯片ATmega128的A/D转化参阅电压选为VCC,即5 V,电流传感器输出不超越A/D转化参阅电压,如图4所示。
2.4 速度检测电路
Proteus的无刷直流电机模型自带3个霍尔传感器,霍尔传感器在空间上呈120°散布,用于确认电机转子方位,而且3个霍尔传感器在电机运转时其间两相输出信号相差120°,转子每转过360°电视点时,3个霍尔传感器的输出信号组合在一起对应换相的6种编码状况。每逢电机转子转过了60°角,3个霍尔传感器的输出状况就会相应改变一次。所以,电机的转速就可以经过核算单位时刻T内捕获的霍尔传感器输出改变的次数n换算出来,转速换算公式为V=60 n/T。由此,要测量到电机的转速,就经过主控芯片的输入捕获功用获取到3个霍尔传感器中的一路输出信号的周期,然后由转速换算公式核算出电机转速即可。
3 软件规划
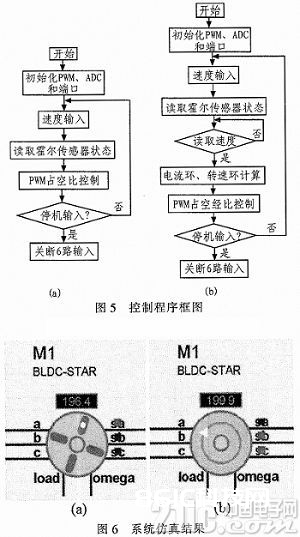
体系选用开环操控和转速电流双闭环PID操控,进行比照仿真试验。开环操控不管硬件电路仍是操控程序都较闭环PID操控简略且易完成,一般在安稳负载运用中选用。在改变负载运用中,当电机转速在必定规模内时,负载会产生改变。需求转速操控精度和杰出的动态呼应,因此运用高档操控算法,但也增加了操控器的复杂性。闭环操控选用转速电流双闭环增量式PID操控战略,两种操控方法的程序框图如图5所示,其间(a)为开环操控程序框图,(b)为闭环操控程序。
4 Proteus仿真成果及剖析
在AVR Studio开发环境下,用C言语进行程序规划。然后在Proteus仿真环境下,向ATmega128单片机导入编译生成的hex文件,运转仿真即可直观地调查无刷直流电机的运转状况。
Proteus中的无刷直流电机模型可以直接显现转速,设定希望转速为200 r/min,并先后导入开环操控程序和闭环操控程序,进行比照调查,无刷直流电机的运转状况见图6。图6中(a)为开环操控的仿真成果,开环操控不能得到安稳的转速,这儿仅仅截取了过程中的一个状况;图6中(b)为闭环操控仿真成果,经过以上的比照,闭环操控中因有PID(份额和积分)操控直流无刷电机的速度能安稳在希望转速值。明显闭环PID操控在电机运转转速上具有更好的操控效果。但软件的实时性在仿真环境下有所下降,呈现了必定程度的延时,在仿真试验中电机的转速与设定的转速依然有少数误差。
5 结束语
文中在Proteus仿真软件中规划了无刷直流电机仿真操控体系,完结了包括主操控器电路、功率驱动电路、功率逆变电路、电流检测电路等硬件电路的规划,运用C言语编程并导入单片机,在Proteus仿真环境下进行了仿真试验。经过试验的直接调查,完成了电机转速的安稳操控,而且经过两种操控战略的比照,标明闭环操控在电机转速操控方面愈加安稳。该体系可以满意无刷直流电机转速操控的规划要求,到达了预期的操控效果,对实践硬件电路的规划和软件操控战略的挑选都具有必定的参阅价值和辅佐效果。