CAN(ControllerAreaNetwork)即操控器局域网络,归于总线式串行通讯网络,其成本低,装置便利,首要用于各种设备监测及操控。其长处如下:
①CAN总线能够多主方法作业,网络上恣意一个节点均能够在恣意时间主动地向其他节点发送信息,而不分主从,通讯方法灵敏。还可分红不同的优先级,以满意不同的实时要求。
②能够点对点、一点对多点及大局播送等几种方法传送和接纳数据。其传输速率可达1 MIbps,传输间隔可达40 m。速率5 kbps时,间隔可达10 km。
③选用短帧结构,每帧字节数最多为8个,可满意一般工业领域中操控指令、作业状况及测试数据的要求。传输n寸l盲-I短,受搅扰少。
④选用不归零(NRZ)编码/解码方法,并选用位填充技能。
⑤选用循环冗余码校验(CR)c、帧检测、信号犯错检测、总线监控、位填充等5种过错监测和纠错办法,然后到达很高的牢靠性。
⑥运用简略便利。许多CAN操控器芯片如PCA82C200、SJAl000、8XC592等及一些DSP与单片机的片内(on—chip)CAN模块完成了CAN的物理层及数据链路层的大部分,用户只需要做两件事:即对CAN操控器进行初始化和对CAN总线上的数据进行收发操作。⑦装备灵敏,体系可扩充性好。CAN总线是依据发送报文的编码,而不是对CAN操控节点进行编码,故增删CAN的操控节点不会对体系形成太大的影响。
本文介绍笔者为满意武汉某钢铁集团硅钢乍产线工艺要求所规划的一种依据CAN总线操控伺服的码垛机器人体系(图1)。详细参数要求如下:①行程:x轴2 000 mm,Y轴800 mm,Z轴800 mm,A轴_+3600,手抓张合30 mm;②最大负载分量为2 kg,额定负载1kg;每垛共20层,垛高200 mm,工件层与层间90°角穿插排放;④最快运转速度为800 mm/s,均匀运转速度为500 mm/s;定位精度0.1 mm。
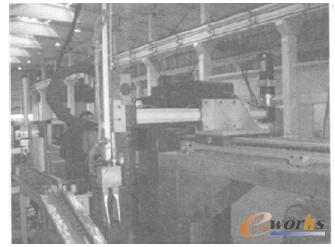

图1机器人体系图示
1 体系构成
(1)机器人选用德国RobWorker四轴(X、Y、Z直线轴和A旋转轴)直角式坐标机器人,其机械手依据抓取工件的尺度及抓取空间来规划,要求成果简略、牢靠、简便。
(2)电动机选用法国施耐德公司的Lexium05A系列伺服电动机和德国百格拉步进电动机。
(3)触摸屏选用台湾WinView的触摸屏MT508TV45 WV
(4)减速机依据各轴的运动速度、扭矩及转动惯量,体系规划时在x、y、Z轴上各自加一台减速机。
(5)中央处理器选用施耐德公司TSX Micro系列PLC:TSX 3721。
(6)CAN总线通讯适配卡TSXCPPI 10。
(7)施耐德PLC编程软件PL7 V4.4,施耐德伺服调试软件Powersuit,通讯组态软件Sycon。