运动操控根底
为了澄清MEMS陀螺仪噪声特性与其对体系要害特性的影响之间的联系,第一步常常是要对体系作业原理有一个底子了解。图1是一个运动操控体系架构示例,其间要害的体系元素被拆分为多个功用模块。此类体系的功用方针是为对惯性运动灵敏的人员或设备创立一个安稳的渠道。运用实例之一是用于自主驾驭车辆渠道上的微波天线,车辆在恶劣的条件下机动行进,车速或许会引起车辆方向忽然改变。若不能实时操控指向视点,当发生此类惯性运动时,这些高指向性天线或许无法支撑接连通讯。
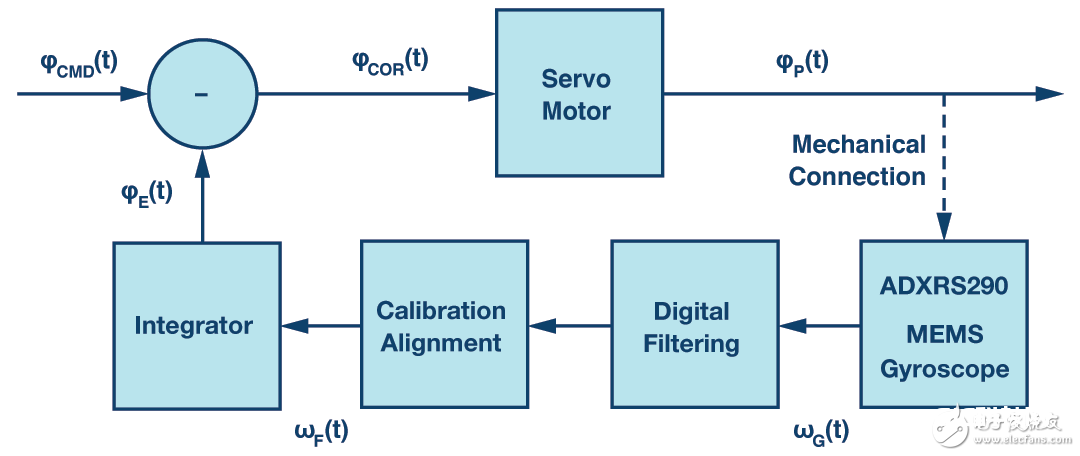
图1. 运动操控体系架构示例。
反应环路图1. 运动操控体系架构示例。从MEMS陀螺仪开端,其在安稳渠道上观测旋转速率 (φG)。陀螺仪的角速率信号馈入专用数字信号处理部分,其包含滤波、校准、对齐和积分,以发生实时方向反应 (φE)。伺服电机的操控信号 (φCOR) 来自此反应信号与指示方向 (φCMD) 的比较,而指示方向可来自一个中心使命处理体系,或许代表一个支撑渠道上的设备以抱负办法运转的方向。
运用示例
图1显现了运动操控体系的架构视图,剖析运用特定的物理性质也能得出有价值的界说和见地。考虑图2中的体系,它是生产线主动查看体系的概念视图。该摄像头体系查看运送带上移入移出其视场的物件。在这种装备中,摄像头经过一根长支架固定于天花板;针对摄像头要查看的方针巨细,摄像头经过支架所决议的高度(参见图2中的D)来优化其视场。工厂中满是各种机器和其他作业,因而,摄像头会不时地发生 摇摆(参见图2中的φSW(t)),这或许引起查看图画的失真。图中的赤色虚线是此摇摆引起的总角向差错 (±φSW) 的夸张视图,绿色虚线标明能够支撑体系图画质量方针的角向差错水平 (±φRE)。图2中的视图运用查看外表上的线性位移差错(dSW、dRE)界说体系级要害方针(图画失真)。这些性质与摄像头高度 (D) 和角向差错项(ϕSW、φRE)之间有着简略的三 角函数联系,如公式1所示。
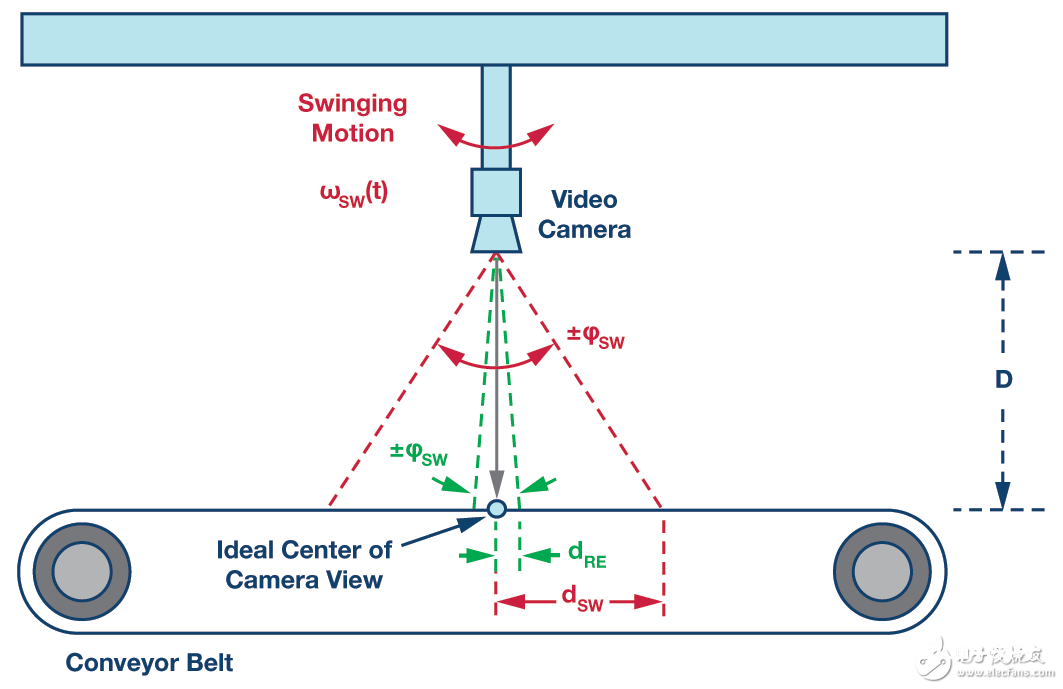
图2. 工业摄像头查看体系。
关于此类体系,最适合的运动操控技能是所谓图画安稳化技能。前期图画安稳体系运用依据陀螺仪的反应体系来驱动伺服电机,然后调整图画传感器在快门敞开期间的方向。MEMS技能的呈现掀起了一场革新,协助降低了这些功用的尺度、本钱和功耗,导致该技能广泛用于当今的数字摄像头。得益于数字图画处理技能(其算法中依然运用依据MEMS的角速率丈量)的前进,许多运用已不再运用伺服电 机。不管图画安稳是由伺服电机完成,仍是经过对图画文件的数字后处理完成,陀螺仪的底子功用(反应检测)依然未 变,其噪声影响也依然存在。为简明起见,本评论将聚集于经典办法(图画传感器上的伺服电机)来调查相关度最高的 噪声底子原理,以及它们与此类运用最重要的物理性质之间的联系。
角向随机游动 (ARW)
一切MEMS陀螺仪的角速率丈量中都有噪声。这一传感器固有噪声代表的是陀螺仪在静态惯性(无滚动)和环境条件(无振荡、冲击等)下运转时其输出中的随机振荡。MEMS 陀螺仪数据手册中用来描绘噪声特性的最常见方针是速率噪声密度 (RND) 和角向随机游动 (ARW) 。RND参数一般 以°/sec/ Hz为单位,依据该参数和陀螺仪的频率呼应,能够简略地猜测角速率方面的总噪声。ARW参数一般以°/ hr(小 时)为单位,当剖析特定期间内噪声对视点估量的影响时,该参数常常更有用。公式2是依据角速率丈量来估量视点的一 般公式。此外,它还供给了一个将RND参数与ARW参数相关起来的简略公式。此联系式与IEEE-STD-952-1997(附录C) 中的联系式比较有很小的改动(前者是单边FFT,后者是双方FFT)。
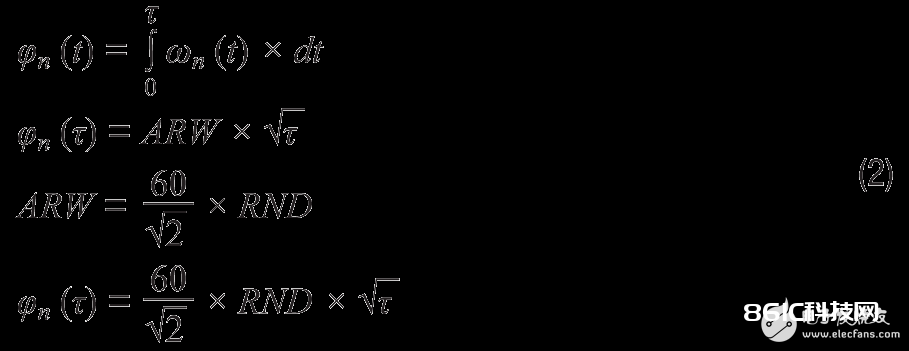
图3是一个图形参阅,有助于咱们进一步评论ARW参数代表 的特性。图中的绿色虚线代表陀螺仪RND为0.004°/sec/ Hz时的ARW特性,相当于0.17°/ hr的ARW。实线代表此陀螺仪输出在25 ms周期内的六个独立积分。角向差错相关于时刻的随机性标明,ARW的首要作用是估量特定积分时刻内的角向差错计算散布。另请留意,此类呼应假定运用高通滤波来消除积分进程中的偏置差错。
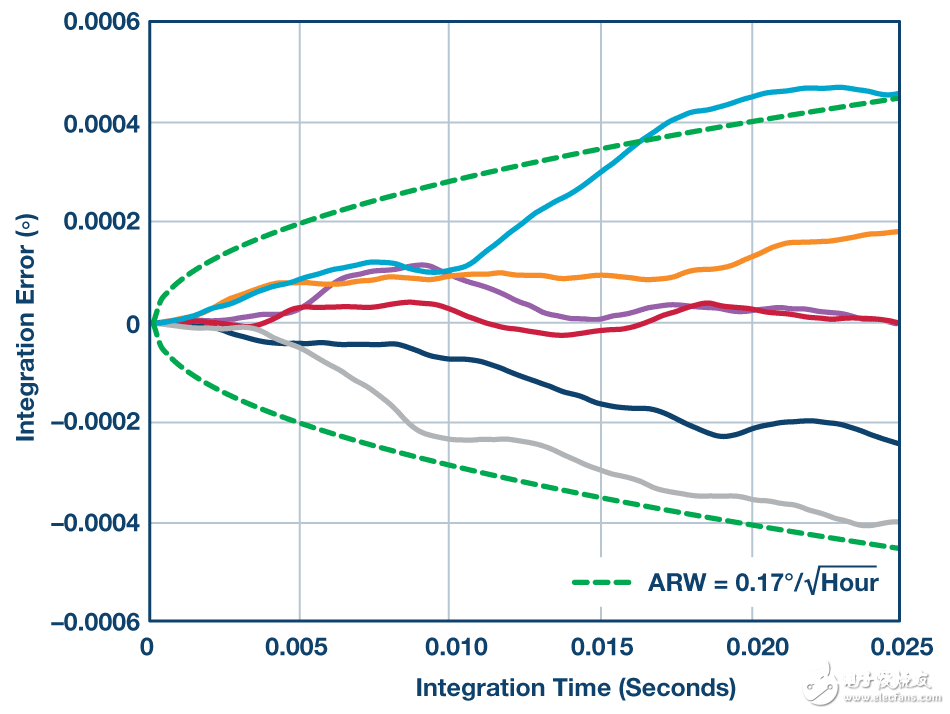
图3. 角向随机游动 (ADIS16460)。
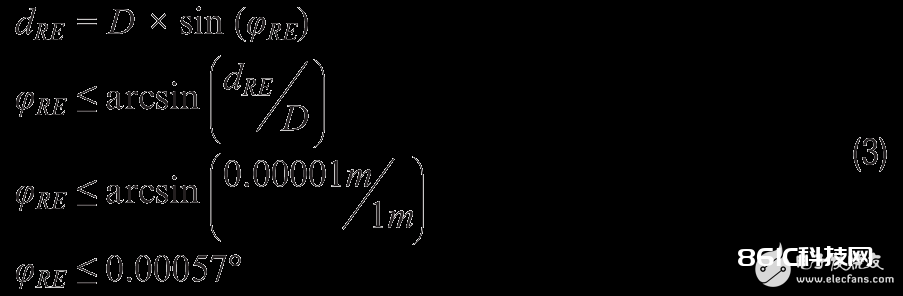
回过头看图2中的运用示例,将公式1和公式2结合便可把重要规范(查看外表上的物理失真)与MEMS陀螺仪数据手册一般会供给的噪声功能方针(RND、ARW)相关起来。在此进程中,假定公式1中的积分时刻 (τ) 等于图画捕捉时刻可供给进一步且很有用的简化。公式3运用公式1中的一般联系来估 计,当摄像头距查看外表1米 (D) 且最大容许失真差错为10μm (dRE) 时,陀螺仪的角向差错 (φRE) 有必要小于0.00057°。
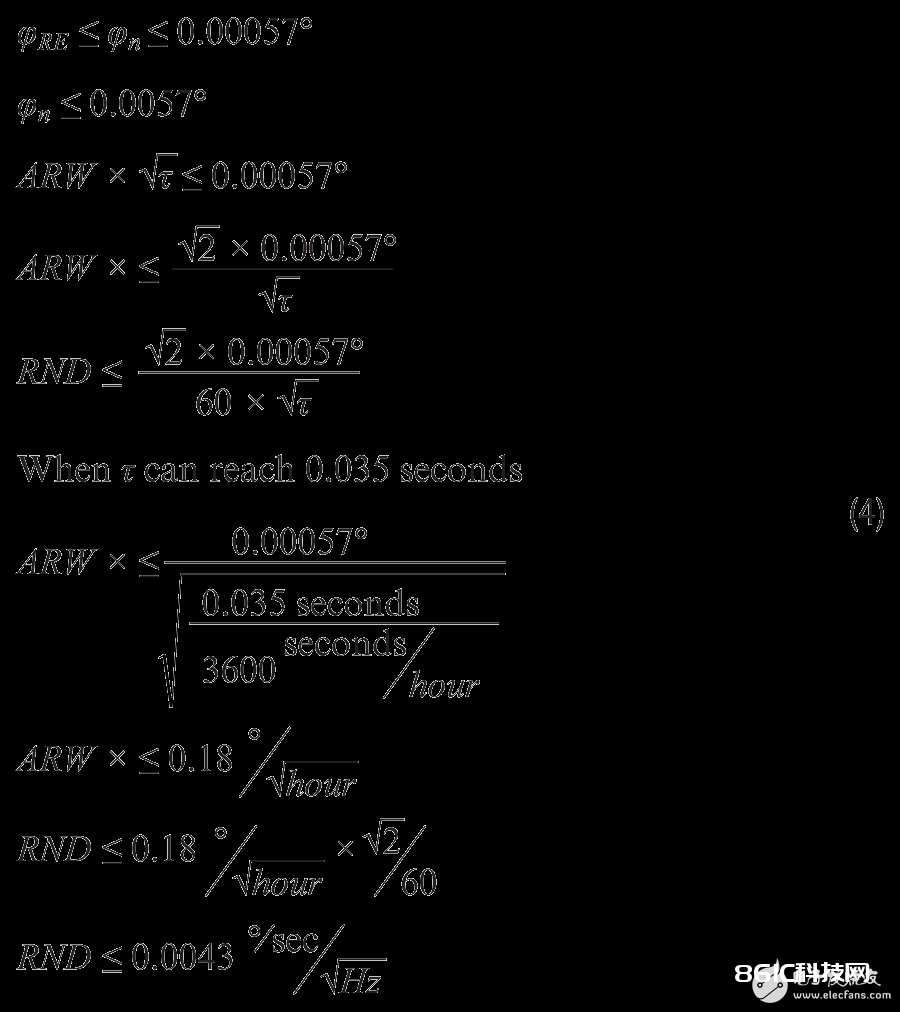
公式4将公式3的成果和公式2中的一般联系相结合,用来猜测特定情况下对MEMS陀螺仪的ARW和RND要求。该进程假定图画捕捉时刻35 ms等于公式2中的积分时刻 (τ),因而能够预 测,为了到达要求,陀螺仪的ARW需求小于0.18°/ hr,或许RND有必要小于0.0043°/sec/ Hz。当然,这或许不是这些参数支撑的仅有要求,但这些简略的联系供给了一个比如,告知咱们怎么将其与已知要求和条件联系起来。
角速率噪声与带宽
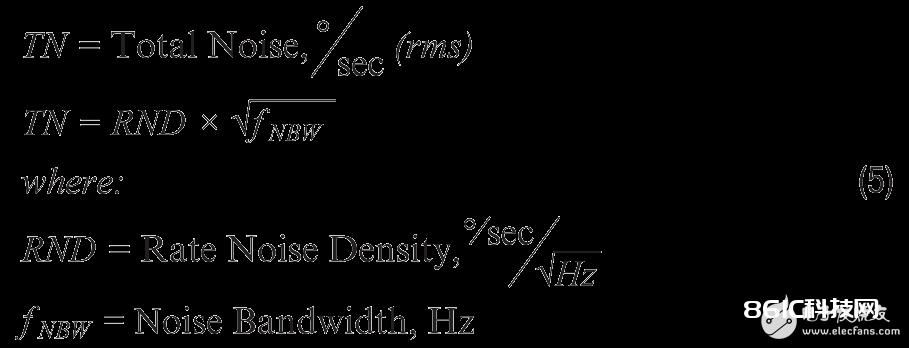
供给接连指向操控的体系开发者或许更乐意从角速率方面来评价噪声影响,由于他们或许没有固定的积分时刻来运用依据ARW的联系。从角速率方面评价噪声常常要考虑RND参数和陀螺仪信号链的频率呼应。对陀螺仪频率呼应影响最大的常常是滤波,其支撑环路安稳规范的专用要求,并能按捺对 环境要挟(如振荡)的不相干传感器呼应。公式5给出了一种简略办法来预算与特定频率呼应(噪声带宽)和RND相关的 噪声。
当RND的频率呼应遵从单极点或双极点低通滤波器曲线时, 噪声带宽 (fNBW) 和滤波器截止频率 (fC) 将有公式6的联系。

例如,关于RND为0.004°/sec/ Hz的ADXRS290,图4供给了其噪声的两条不同频谱曲线。图中的黑色曲线代表运用双极点低通滤波器(截止频率为200 Hz)时的噪声呼应,蓝色曲 线代表运用单极点低通滤波器(截止频率为20 Hz)时的噪声呼应。公式7计算了各滤波器的总噪声。同预期共同,200 Hz 版别的噪声高于20 Hz版别。
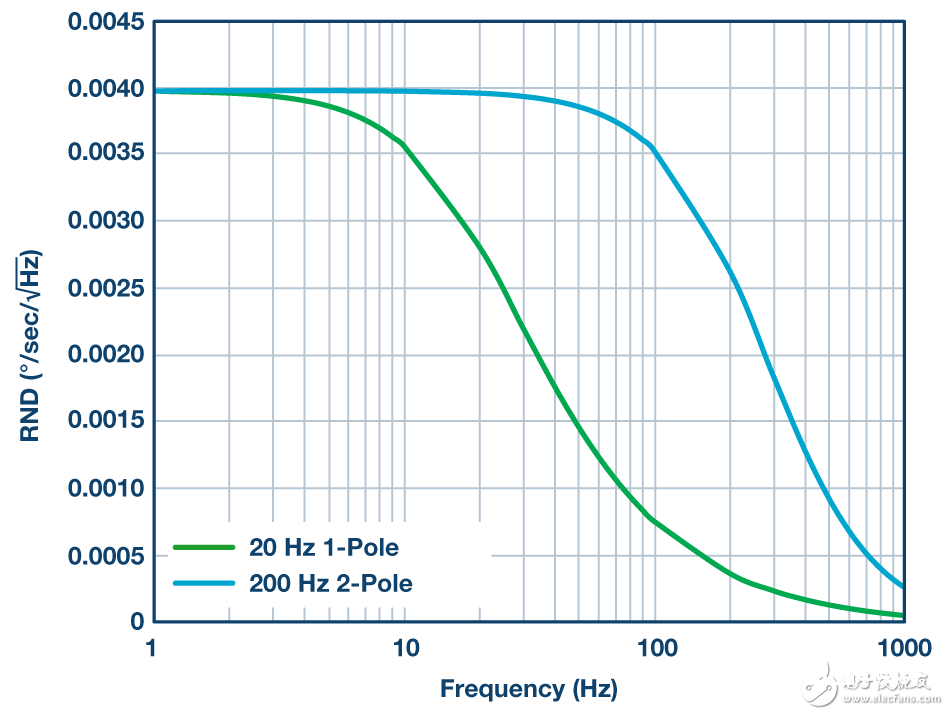
图4. 运用滤波器时的ADXRS290噪声密度。
若体系需求定制滤波,其频率呼应 (HDF(f)) 不符合公式6和7中的简略单极点和双极点模型,则可运用公式8供给的更一般联系来猜测总噪声:

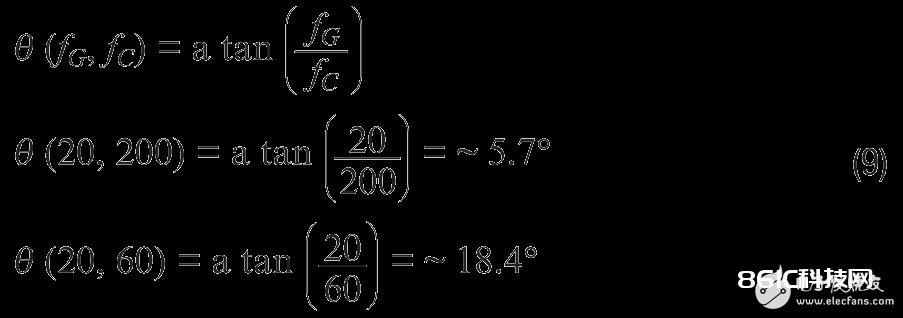
除了会影响总角速率噪声以外,陀螺仪滤波器还向总环路呼应奉献相位推迟,这会直接影响反应操控体系的另一重要质量要素:单位增益交越频率时的相位裕量。公式9用于估量单位增益交越频率 (fG) 时单极点滤波器(fC = 截止频率)对操控环路频率呼应发生的相位推迟 (θ)。公式9中的两个比如分别是截止频率为200 Hz和60 Hz的两个滤波器在20 Hz单位增益交越频率时的相位推迟。这对相位裕量的影响或许导致要求陀螺仪带宽比单位增益交越频率大10倍,因而会更倾向于挑选RND较佳的MEMS陀螺仪。
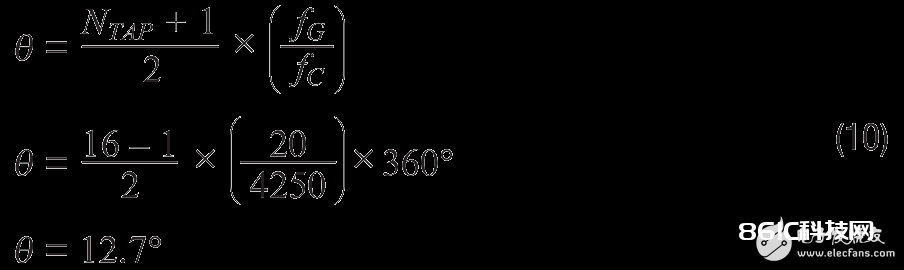
现代操控体系常常运用数字滤波器,或许运用不同的模型来猜测其在操控环路要害频率时的相位推迟。例如,公式10用于猜测一个16抽头FIR滤波器 (NTAP) 的相位推迟 (θ),其以 4250 SPS (fS) 的更新速率( ADXRS290 )运转,单位增益交越频率 (fG) 同样是20 Hz。此类联系有助于确认一个体系架构对此类滤波器结构容许的总抽头数。
定论
底子问题是角速率反应环路中的噪声或许直接影响运动操控体系的要害功能规范,因而,在规划新体系的进程中,应当尽早予以考虑。比较于仅知道需求低噪声的人,能够量化角速率噪声对体系特性影响的人将具有显着的优势。他们将能确认功能方针,在运用中发生可观测的值;当其他项目方针 支撑考虑特定MEMS陀螺仪时,他们将能有效地量化其对体系的影响结果。一旦有了这种底子了解,体系规划师便可专 注于确认能够满意功能要求的MEMS陀螺仪,运用带宽、速率噪声密度或角向随机游动来辅导其考虑。当他们希望优化 所选传感器的噪声功能时,能够运用其与带宽(角速率噪声)和积分时刻(角差错)的联系来推进界定其他重要的系 统级特性,然后支撑对运用最合适的功能。