贝加莱GMC概念
通用运动操控GMC(Generic Motion Control)是由贝加莱提出的适用于各种运动操控的一个概念,在这个GMC的框架下,CNC和机器人将被集成在一个完好的框架下,这得益于B PCC的杂乱使命处理才能,面向杂乱操控使命的PCC选用分时多使命的实时操作体系Automation Runtime来完成对不同使命的处理,这些使命包括逻辑、液压、显现、CNC和机器人、运动操控、安全技能及通讯使命。
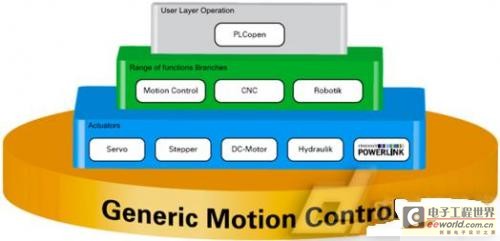
在GMC的架构下,履行机构将不受限制
客户完全能够依据实践使用的需求,依据本钱优化的准则挑选不同的履行机构作为体系的履行单元,这包括异步电机、步进、直流、同步伺服、扭矩电机等。
CNC
与传统机器人和CNC需求专用体系的不同,B Studio库中支撑针对CNC和机器人的开发使用接口,例如经过PLCopen即可履行运动操控、又可运转逻辑、液压等履行机构的操控。
它带来的巨大革新在于:
●无需专用体系的CNC和机器人体系;
●软件上持续保存传统机器人和CNC的操作习气;
GMC是对传统CNC和机器人技能与PLC操控的交融
之所以会发生专用的CNC体系是由于传统的PLC没有满意的才能来处理CNC和机器人这样关于实时性有极高要求的使命,而PLC的优势又在于其处理逻辑使命,可是,关于杂乱的算法规划则又是PC的专长而非PLC的专长,GMC是运转在B PCC操控体系架构之上的,B
由于在某种意义上来说,专用体系的专用性在于软件,而不仅仅是硬件,若硬件能够满意则软件能够运转在各种渠道上。

B GMC架构规划
GMC-一个总线、一个体系、一个软件
一个总线
Ethernet POWERLINK是由B
一个体系
CNC
一个软件
B Studio渠道是一个适应于一切工业自动化范畴使用程序开发的渠道软件,它包括有在流程和目标方面的集成才能。