摘要 选用单片机智能操控以完成由风、光、市电多路输入的大功率LED驱动电路规划。其间,风景发电互补体系完成了不同作业情况下的最大功率点盯梢操控战略,并以模仿的风景动力展现发电特性,完善了风景互补办法。蓄电池充电操控计划分段优化充电进程,以智能化操控完成动力的最大运用。然后完成了驱动电路全体最优功用的规划。
关键词 驱动电路;风景互补;LED;MPPT
智能LED驱动电路体系是根据风能和太阳能发电体系而改善规划的。其间,风电和光伏发电赋予了较高的优先级,在两种动力不足以供应照明时,再选用市电供应电源。由于受气候、时刻、地域条件的改动,太阳能和风力资源有着不同的散布,为到达最大的风能光能运用率,选用了风景互补体系,并进行MPPT操控战略改善动力输入计划。单片机操控体系可对多路电源输入进行操控,按必定的优化计划履行对驱动电路供电。由于未选用单一动力的电力供应,为使风力发电和太阳能发电到达最大功率,MPPT操控战略扮演了重要人物。文中将归纳太阳能电池板和风力发电机组的特色,剖析它们的输出功率特性,以优化的风景电源对蓄电池的充电进程。在单片机智能操控体系的操控下,树立一个合理的解决计划,供应一个恒流电源以满意项目规划要求。
1 多路输入驱动LED根本计划
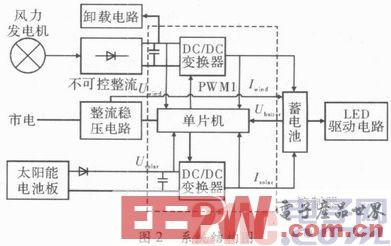
LED智能驱动电路体系的结构图如图1和图2所示。体系由负载、操控器、驱动电路、风力发动机、太阳能电池板、蓄电池和市电组成。
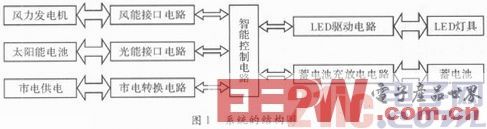
多路输入就是以市电、太阳能电池板和蓄电池作为电源动力,在实践工况中常常遇到,由于市电下许多路灯的作业情况不太安稳或许断电,这样需求照明时常常停电影响交通,这时可以经过太阳能或蓄电池进行供电,即在驱动电路里边参加挑选判别电路组成多输入操控挑选器。一起运用MPPT操控办法,完成最大极限的动力运用。经过对风机发电和光伏发电的操控调理,若发电电能未能供应一切电气负载时,风景互补操控器将传送给负载蓄电池电能。反之,操控器操控电路直接供应负载电能,并将剩下电能充电至蓄电池内。一起操控器维护蓄电池,使其作业在合理的电压区域内,保证蓄电池安全安稳的作业。
2 MPPT操控计划
2.1 风力发电特性原理
由流体力学中气流动能公式可以得出选用气流所具风能的巨细同经过的面积、气流密度以及气流的速度成正比联系
由于风力发电机在发电风能运用率的局限性,无法做到天然风能的悉数运用,所以在核算风机实践有用功率输出时需求考虑留在尾流中未运用的动能,根本公式为
上式,一般情况下Cp<0.593,其表明风力发电机的实践风能运用系数,可由贝兹(Betz)极限理论得到。风能的运用系数Cp与风力机的叶尖速比有关,叶尖速比一般用λ来表明,由风力机叶尖旋转的圆周速度和风速的比值来确认
图3给出了风能的运用系数和叶尖速比的曲线联系,是风力机的根本特性之一。
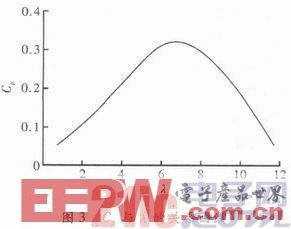
在λ处于某一特定值λ0时,就定浆矩风机而言,Cp到达最大而且风力机具有最大机械功率的输出,最佳叶尖速比用λm表明。因天然风具有不定随时改动的特性,这会使得Cp在大多数情况下不在最大作业点上,此刻,风机的功率常常处在较低水平。关于这个问题,处理时需求操控风力发电机的运转速度,在一个较大的风速范围内,尽可能使风能的运用系数在最大值邻近运转,且叶尖速比λ到达最为优化的叶尖速比,以完成风电转化最高功率的盯梢。
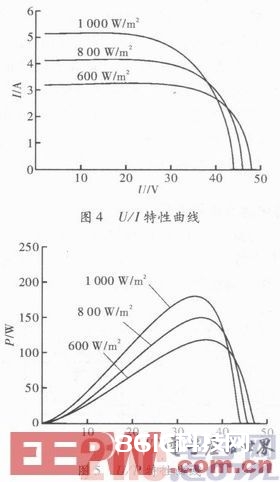
2.2 太阳能电池板特性
太阳能电池的功率特性非线性化较为显着,简单被外界要素影响。不同日照下表现出的电压/电流和电压/功率特性,如图4和图5所示。
2.3 变步长扰动最大功率点查找操控
经过剖析风力发电机的输出特性,可选用3种办法确认其最大功率点:扰动查找其最大功率点、操控功率信号、操控叶尖速比。由于要借用风速计,使得叶尖速比操控本钱较高,它首要应用于大型风机操控。为操控功率信号,需求得到风力发电机的最大功率负载曲线。选用最大功率点扰动查找操控较为简洁。而太阳能MPPT的操控有稳定电压操控法、最大功率点的调查扰动法、导纳增量法。
归纳考虑太阳能和风力发电机MPPT操控功用,本项目运用改动步长查找扰动办法操控最大功率点,MPPT操控的关键是怎么使最大充电功率电池电压平稳,一起电池充电和发电部分功率持平。检测电池的充电电流以及电压,可以核算得到此刻的电能运用率。
当体系运转时,操控信号开始基准功率为Pa,其占空比为x,输入一个扰动△x,Pb为检测扰动后的功率。当Pb>Pa时,证明扰动方向无误,坚持同方向施加扰动已查找最大功率点;反之,反方向扰动。双向扰动之后,判别Pb和Pa,若检测扰动后的功率Pb小于等于开始基准功率Pa,持续减小扰动起伏,并再次进行双向查找,当扰动△x