在实践出产进程中,常常要用到具有主动换向功用的操控部件,如机械加工中的往复运转(位移),直流电源的正反向输出,电动机的正反转运转等现象,都是当正向(或反向)运转到一守时刻或必定方位时,主动换为反向(或正向)运转,循环往复的进程。完结这一进程的主动化,便是规划一套操控电路,再配以位移传感器或时刻继电器。目前市场现有的时刻继电器尽管可以用多个组合来满意一些运用场合的要求,但仍存在着重复计时差错大,安稳牢靠运转性不高,运用不方便灵敏等问题。为此,笔者研发了以单片机为中心组成的时刻/位移换向操控器SWHX-1,该体系具有本钱低一级特色,可彻底且战胜以上缺乏。
电路组成及作业原理
SWHX-1的内部电路如图1所示。该体系分为输入输出电信号转化、CPU 软件编程操控和守时延时设定三部分,整个电路共有14条引出线,其间2、3、4脚为直流地线公共端VGND。该器材可用交直流两种供电方法作业。当用沟通供电时,经过引脚13、14输入沟通12 V,经桥式整流、稳压后供应内部电路恒压基准电源,并将整流后的直流12 V经引脚1、2、3、4送出,以供外部其它电路运用;当用直流供电时,引脚1、2、3、4则变为输入端,输入的12V直流电压经稳压后再供应内部电路,该方法可省去沟通电源,但要留意将引脚14、13置于悬空状况。
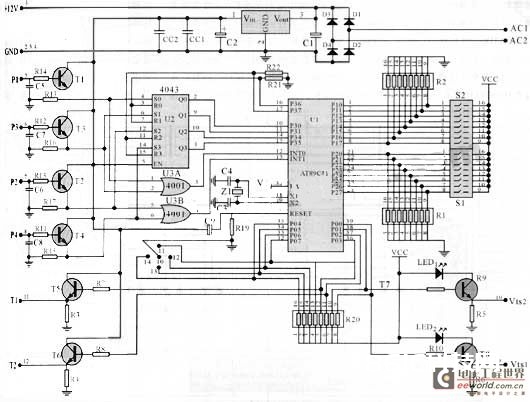 |
| 图1 时刻/位移换向器电路原理图 |
SWHX-1内部电路规划有1路换向延时和2路守时输出,换向延时时刻是指正向(或反向)输出组被关断后延时一段时刻后才注册反向(或正)组作业的时刻,用户可在0.5~2s之间恣意设定;2路守时时刻别离是指正向和反向组输出的作业时刻,用户可在1m~7h31m之间恣意设定。若1m~7h31m 的守时时刻不能满意运用要求时,另留有4个端口P1~P4,可外接4个时刻继电器或4个行程开关以补偿。Pl和P3为正向组,P2和P4为反向组。
◇ 延时时刻的设定
(1)延时时刻设定法
图1中t0~t4为换向延时时刻设定短接开关,t0为对地公共端,t1~t4别离与0.5 s、1 s、1.5 s、2 s相对应,二者短接时,经过CPU软件编程可完结相应的换向延时。例如t0与t1短接时,延时为0.5 s;t0与t3短接时,延时为1.5 s。
(2) 守时时刻设定法
图1中的S1和S2为8位守时时刻设定拨位开关,每个开关前三位为小时位,后5位为分钟位,选用二进制编码方法,当8位拨码选定后,经过CPU的P1和P2口送入,经软件编程操控,完结相应的守时功用。所以每路的守时时刻可在1m一7h31m之间恣意设定。
◇ 守时换向器的作业原理
当SWHX一1用做守时换向操控时,CPU首要读入拨位开关S的守时设定值,经软件编程辨认并经过CPU内部守时器和软件延时完结,当守时时刻到后,将经过P0口经引脚12、11送出一个守时到脉冲,当引脚12、11别离与5、7脚短接时,该守时到脉冲将向CPU发生一个中断恳求信号,CPU接收到这一中断恳求后会经过引脚Vs1端口输出一个封闭电位信号,以中止当时正在作业的一组,并经0.5~2 s延时后,经过引脚Vs2端口输出一个发动信号,来发动另一组开端作业,然后完结一次换向作业周期。反之亦然,循环往复。
◇ 做位移换向器的作业原理
当SWHX一1用做位移换向操控时,上述守时功用将不起作用,而是将位移检测传感器(一般为行程开关)送来的“位移到”信号经过引脚5、7端口向CPU宣布中断恳求,当CPU接到该中断恳求信号今后,则完结上述换向作业进程。别的,引脚6、8是用于位移约束的,由于绝大多数实践出产进程中的位移都是有约束的,所以将限位传感器宣布的信号经端口6、8送入,CPU在接到该恳求信号后,当即经过引脚9、10宣布限位封闭信号,以中止位移作业。