电容式挨近传感器遍及用于检测传感器近间隔处是否存在用户。经过检测,当感应到有用户存在后,咱们即可挑选背光发光来凸显特定按钮,或许将体系从低功耗运转形式下唤醒。详细就轿车运用而言,当电容式挨近传感器感应到用户在车内时会翻开车厢灯火,或激活无钥匙车门解锁体系。除了感应传感器邻近是否存在用户之外,咱们还能经过恰当放置的多个挨近传感器来辨认空中的简略手势。一切传感器的数据可以结合在一起,然后映射出传感器邻近区域中用户的手势操作。这些手势可用来给体系供给输入信息,包含操控媒体播放机、进行地图导航或许阅读播放列表等。
咱们可恰当放置多个挨近传感器,使其相互之间留出恰当的间隔。当手划过传感器时,每个传感器检测到手部动作的时刻瞬间都不相同。不同传感器的相对检测次序和检测时长可用来剖析手部移动的方向和速度。手势可以很简略,例如在这些传感器上方从左到右画一条直线;也可以很杂乱,包含用手在空中画圆圈之类的图画。在本文中,咱们将剖析怎么运用多个传感器的不同形式进行简略的手势辨认以及怎么完结愈加杂乱的手势操作。
下面咱们剖析一下如图1所示的轿车信息文娱体系四周放置的四个电容式挨近传感器。

图1. 右图为轿车信息文娱体系四周放置的电容式挨近传感器,左图标示出其方位。
传感器的放置应适可而止,要保证在传感器面板上方做手势时能按次序触发传感器进行辨认(不同次序会发生不同作用)。咱们会对传感器的触发次序进行承认。假如次序与某个预设序列相匹配,就会宣布这个手势对应的操作指令。咱们将选用图1所示的传感器放置形式作为参阅,向您介绍本文中评论的手势操作。
想象一下手从左到右在传感器上方画一条直线的简略手势操作,如图2(a)所示。手从左到右掠过传感器时,当手一挨近体系,左边传感器就会首要被触发。“触发”这个词在这儿是指传感器检测到有物体存在,而不能误解为启用挨近传感器。由于体系一旦翻开,挨近传感器就现已在启用了,而且会对邻近区域的物体坚持扫描感应。
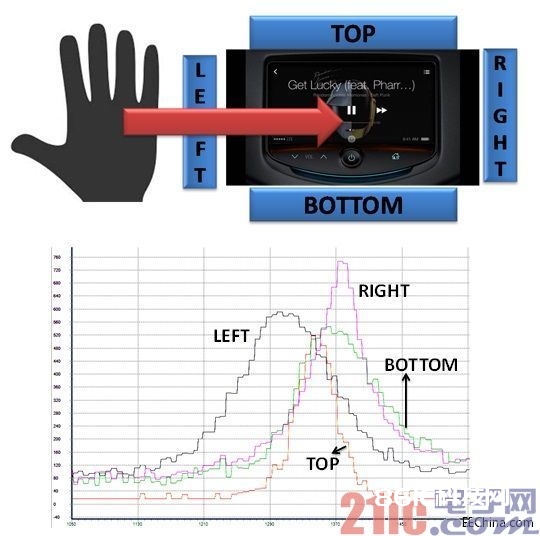
图2. (a手在空中从左到右画一条直线;(b)手画直线时,每个传感器的信号图
手在操控台上方划过期,顶部、底部的两个传感器被触发,一起左边传感器仍坚持触发。当手继续向右划动时,右侧传感器被触发。而左边传感器则在手脱离其检测规模后中止感应。当手划过右侧传感器,顶部、底部的传感器则不会再检测到手的存在。手进一步远离后,右侧传感器也会中止感应。传感器触发的次序将是以下其间一种,详细取决于手的方位和各个传感器的灵敏度:
右→顶→底→左
右→底→顶→左
右→底→左
右→顶→左
以上一切传感器激活序列都对应于(左→右)的手势。本例选用PSoC完结电容式挨近传感器。PSoC中的电容至数字转换器(也便是Capsense Sigma Delta)可用来丈量电容。CSD模块的输出为原始计数,原始计数越大,传感器感应到的电容也就越高。手离挨近传感器越近,传感器的%&&&&&%就越大。
当传感器的原始计数超越根底值的某个特定阈值时,传感器就会由于在其邻近区域检测到物体的存在而被触发。手从左到右画直线(如图2(a)所示)时,四个传感器的原始计数图则如图2(b)所示。该图承认了上述传感器的激活次序。假如手反方向移动,也便是(右→左)的手势操作,那么传感器触发序列与上述左右两边传感器的激活序列相反。也便是说,这时(右→左)手势对应的传感器激活序列为以下其间一种:
右→顶→底→左
右→底→顶→左
右→底→左
右→顶→左
以上所述的两种手势都是手在水平方向的移动。相同,手还可以笔直方向上画直线,也便是(顶→底)或(底→顶)的手势,详细取决于手移动的方向。
(上→下)或(下→上)的手势可关联于上下翻滚菜单或曲目列表等简略操作,如图3所示。

图3.用手笔直方向上画直线的挨近手势来翻滚菜单
(左→右)和(右→左)的手势可关联于音乐播放器运用的换歌或换碟操作。经过放置挨近传感器(如图4所示),相同的手势也可用来代替按压按钮来开关车舱内部的照明灯。

图4. 经过手画直线来操控车舱顶灯
(顶→底)手势类似于向上/下按钮按压动作。不过,在按住向上(向下)按钮不放时,屏幕会不断向上(下)翻滚,直到松开按钮中止。换言之,只需按下按钮,这个动作就有“黏性”。要让手势操作彻底替代按钮操作,那么手势操作也应该可以支撑这种“黏性”功用。咱们将对手势进行如下修正来满意这一要求。手从顶部传感器向底部传感器移动时,只需手划过底部传感器,体系就将此解码为(顶→底)手势。咱们更改一下手势,当手按手势次序抵达最终的传感器(这儿指底部传感器)时,就宣布向下翻滚的指令。而且只需手坚持在底部传感器上方不动,就会一向重复宣布向下翻滚的指令。等翻滚到需求找的菜单项,手再继续向下移动并脱离底部传感器感应规模,这时就会中止宣布向下翻滚的指令。也便是说,要让手势操作也有“黏性”,手不能一会儿完结从上到下的划动,而是要在最终的传感器处先中止一下,找到需求的项目之后再脱离该传感器的感应规模。只需手停在传感器感应规模内不动,就会一向宣布指令。
图5显现了(顶→底)黏性手势的顶、底部传感器的原始计数图。顶部传感器中止感应手势操作之后,底部传感器会坚持更长时刻的触发状况,这说明手在底部传感器的感应规模停下来了,而不是不停地直接划下。在发送黏性指令时,咱们要查看顶部传感器是否先被触发,然后是否触发了底部传感器。这时顶部传感器现已不再感应到手势操作,而底部传感器仍可以继续感应到手在邻近。当手在底部传感器规模内逗留超越必定的时刻阈值后,只需底部传感器感应到手在邻近,就会一向宣布黏性指令。相同,咱们也能对其它手势操作进行修正,然后完结“黏性”特性,这就能让手势操作彻底替代上下按钮功用了。