摘要:本体系选用TI公司32位DSPTMS320F28027作为操控芯片,规划制造了一款能够循迹并寻觅平衡的智能小车。依据所给定的跑道和跑道上的方位标志对小车进行硬件规划和程序编写。循迹分为前后各4路循迹,选用的是4路红外循迹模块,确保了小车能够行进撤退均在指定路线上。
关键词:TMS320F28027芯片;红外循迹;倾角传感器;模数转化器
导言
本体系选取了32位TMS320F28027作为运动物体的操控中心。TMS320F28027具有丰厚的资源,具有32位架构、高档外设、高度的模仿集成、高达128 KB的快闪存储器,一起还包含功用强壮的ADC、高分辨率PWM以及湿著增强的捕获单元等许多特性优异的组件、高精度片上振荡器、模仿比较器、上电复位与掉电维护等在内的各种集成模块。本文以电动车跷跷板的规划为例,介绍了TMS320F28027的PWM电机调速、A/D采样、中止和I/O口等的操作和操控,以及LCD、L298n、红外循迹等外部扩展硬件的衔接技巧和办法。
1 小车功用介绍
1.1 按键和显现功用
按键操作:运用3个按键别离进行挑选、承认、退出功用操作,在体系上电后,显现界面进入主菜单,经过“挑选”按键埘“板上寻平衡”、“上板寻平衡”两个功用进行挑选,选定完毕按下“承认”键,体系进入对应函数,此刻能够按下“退出”键退出对应的功用函数。
显现功用:LCD实时显现小车的倾角和小车正在履行的功用,成功完结一项操作后LCD给出“OK”的指示,一起在每项操作进行时显现其操作所用时间,完结一切使命后显现出每项操作所耗时间。
1.2 “板上寻平衡”功用
在不加配重的情况下,电动车完结以下运动:
①电动车从开端端点A动身,快速行进到中心点C邻近;
②电动车在中心点C邻近赶快使跷跷板处于平衡状况,坚持平衡5 s,并给出显着的平衡指示;
③电动车从过程②中的平衡点动身,快速行进到跷跷板结尾B处(车头距跷跷板结尾B不大于50 mm);
④电动车在B点中止5 s后,快速撤退回开端端A,完结整个行程;
⑤在整个行进过程中,电动车一直在跷跷板上,并分阶段实时显现电动车行进所用的时间。
其间,抵达C点邻近和撤退回A点有红外循迹设备合作循迹标志完结,寻觅平衡首要由倾角传感器检测小车状况操控小车前后移动完结。
1.3 “上板寻平衡”功用
将配重固定在可调整范围内任一指定方位,电动车完结以下运动:
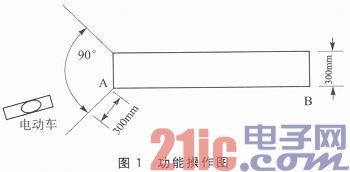
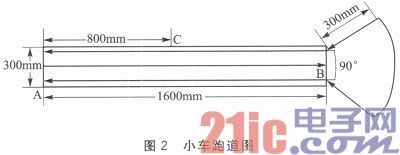
①将电动车放置在地上间隔跷跷板开端端A点300 mm以外、90°扇形区域内某一指定方位(车头朝向跷跷板),电动车能够主动驶上跷跷板,如图1所示。
②电动车在跷跷板上获得平衡,给出显着的平衡指示,坚持平衡5 s以上。
③将另一块质量为电动车质量10%~20%的块状配重放置在如图2所示中A至C间指定的方位,电动车能够从头获得平衡,给出显着的平衡指示,坚持平衡5 s以上。
1.4 跑道和小车介绍
(1)小车跑道
跑道分为两个部分:矩形部分的跷跷板和扇形部分的地上区域。图2中两边箭头代表循迹标识,跷跷板中心箭头为撤退的循迹标识。在跷跷板中部C点放置跷跷板支架,确保跷跷板可自在摇摆。
(2)小车循迹模块设备方位
首要介绍小车循迹模块的设备方位,以保让小车能够正确循迹。行进循迹由小车前部左右各两路的红外循迹设备完结,方位合作跷跷板上行进循迹线设备。撤退循迹由小车后部的4路红外循迹设备完结,方位合作跷跷板上撤退循迹线设备。设备方位如图3所示。

2 功用模块电路衔接
2.1 体系整体模型
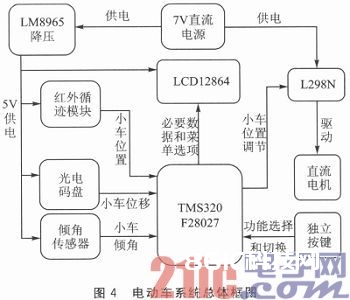
TI公司32位DSP TMS320F28027为体系的操控芯片,体系经过7 V稳压直流电源给电机供电,一起7 V稳压电源经LM8965稳压模块输出5V电压后给其他模块供电。在上电往后运用独立按键合作LCD12864完结功用挑选,挑选功用完毕,小车在红外循迹模块的引导下抵达指定地址开端寻觅平衡,此刻体系对倾角传感器输出电压进行A/D采样并将数据传输给芯片处理,然后芯片输出信号对L298N驱动的直流电机进行调理,合作光电码盘操控小车在跷跷板上移动以完结平衡点寻觅。体系框图如图4所示。
2.2 L298N驱动衔接电路
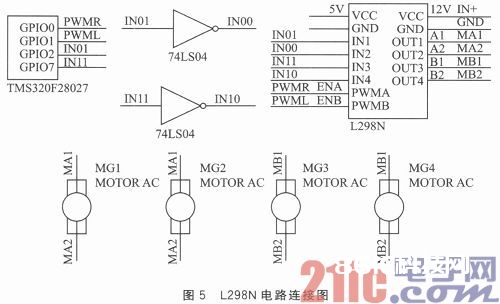
L298N是一块双H桥直流电机驱动芯片,首要是对直流电机进行PWM转速调理,对步进电机进行PWM细分操作。驱动部分的端子电压Vs在+5~+35 V,承载最大电流为2 A;逻辑部分的作业电压为5~7 V,电流为0~36 mA,低电平有用值为-0.3~1.5 V,高电平有用值为2.3 V~Vss。该驱动板可驱动2路直流电机,使能端ENA、ENB为高电平时有用,设置IN1和IN2的输入电平确认电机的滚动方向,改动输入使能端PWM脉冲的占空比完结调速。(留意:当使能信号为0时,电机处于自在中止状况;当使能信号为1,且IN1和IN2为00或11时,电机处于制动状况,阻挠电机滚动。)
由于小车选用的是左右两边速度差转向,所以为了节约I/O口,电机衔接时运用一个I/O合作使能端操控一侧的两个电机的转向和转速使能端操控转速,I/O口操控转向。详细操作:同侧的两个电机并联,电机一端经过I/O口经L298N操控,另一端从同一I/O口引出一根信号线经一非门后由L298N操控。详细电路衔接如图5所示(其间MG1~MG4为4个直流电机)。
方向设定首要函数如下:
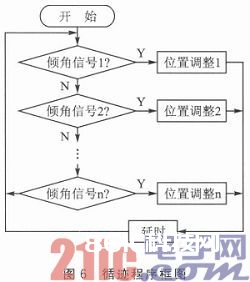
合作循迹模块即可完结小车循迹功用。循迹模块分为前后4路,前4路的4个信号端口与后4路并联,前4路的4个红外循迹模块由一个I/O口供电,后4路供电由此I/O口经一非门供应。只需改动此I/O的凹凸电平即可完结前后循迹模块的切换。循迹程序框图如图6所示。
循迹首要程序如下:

2.3 LCD12864电路衔接
为了节约I/O口,显现选用的LCD为SPI传输型,首要用于必要数据显现以及菜单和体系状况显现。该模块一共有10个引脚,其间除掉电源引脚和空引脚还有RET引脚用于上电复位,CS引脚传输主从状况挑选,SCK引脚时钟信号输入,SDA引脚数据输入,BUSY引脚判忙接口。由于I/O口的约束,咱们选用的并非SPI数据传输形式,而是选用的模仿SPI数据传输。模仿SPI首要是对数据传输时序进行模仿。
模仿SPI数据传输,只能对数据进行一位一位的传输。由于此刻序为上升沿触发,所以在传输之前时钟信号置低,传输完毕后置高。可是程序的编写比较费事,由于此LCD的指令和数据都是8位数据。所以挑选按位与加移位完结输入8位数据,详细程序如下:

在实际操作中,每次上电需要对LCD进行复位设置(RST先置低10 ms左右,然后置高20 ms左右)这样才干确保LCD正常显现,一起在指令和数据传输之前需要对LCD进行初始化操作,即对LCD进行清屏操作(铲除上电一会儿的乱码显现),然后依据需求进行亮度设置。由于此规划中LCD只需进行数据的接纳,所以CS片选端直接接地,设置LCD为从输入设备即可。详细电路衔接如图7所示。

2.4 倾角传感器电路衔接
倾角传感器选用的是数字信号传输的MMA7361,此模块能够检测器材的X/Y/Z三轴的歪斜视点,以及期间的加速度。小车在跷跷板上寻觅平衡只需一个轴检测倾角即可,所以任选一轴与小车车面平行,竖直指向车头即可。
当小车产生前后歪斜时,输出电压改动,经过输出电压的线性改变反映小车的倾角、运动加速度,以及运动的方向。经过A/D采样进行相应的电压/视点、电压/加速度转化,这样便能够时间调理小车姿势。
倾角传感器A/D采样程序设定如下:
结语
本文只用了TMS320F28027的部分功用,算法也比较简略,仅仅为我们的学习沟通抛砖引玉罢了。TMS320F28027还有许多强壮的功用,有待今后我们的学习和运用。
个人的运用经历标明TMS320F28027运算速度快,并且操作简略易学,不只合适完结各种业余的电子规划制造,并且也能满意专业人士的大部分需求,是性价比较高的芯片。在合作外部扩展硬件的运用过程中,需仔细阅读TMS320F28027和硬件模块的电气参数,以避免元器材的损毁。