轮式小车是智能小车机械结构的主体部分,由车身、轮子、变速器、传动轴等结构部件构成。轮式小车还包含供给动力的驱动器,用来搜集智能小车的本身状况信息或外部环境信息,并对多传感器的数据进行剖析、交融,动态调整小车的运动状况,完成在必定条件下的自主行进。
红外传感器模块
电路原理:红外传感电路选用反射式红外传感器,能够方便地完成实时监控并有用避免误触发,灵敏度简单操控。图3为红外检测电路,中心IC器材是LM393,该集成块内部装有两个独立的电压比较器。
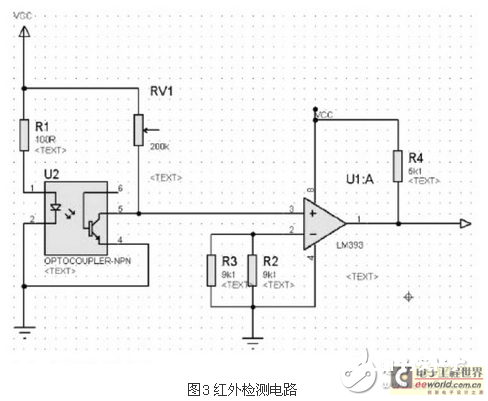
LM393类似于增益不可调的运算放大器。每个比较器有两个输入端和一个输出端。两个输入端一个称为同相输入端(用“+”表明),另一个称为反相输入端(用“-”表明)。用作比较两个电压时,恣意一个输入端加一个固定电压做参阅电压,另一端加一个待比较的信号电压。当“+”端电压高于“-”端时,输出管截止,相当于输出端开路。当“-”端电压高于“+”端时,输出管饱满,相当于输出端接低电位。两个输入端的电压差大于10mV就能保证输出能从一种状况牢靠地转换到另一种状况。因而,把LM339用在弱信号检测等场合是比较抱负的。测速反应电路由发光二极管、光电级管、单稳态电路以及装在主轴上的光电码盘组成。当光码盘上的孔通过发光二极管时,发光二极管宣布的光使光电三极管导通,输出高电平;当光码盘上的非孔部分通过光二极管时,光电极管截止,输出低电平。发生的周期性脉冲经单稳电路整形送高速输入通道IOB2或IOB3外部中止源,获得每次上升沿的时刻值, 便是定时器T1的值,每两次T1上升沿值之差为光电脉冲周期,然后可计算出主轴的转速。
电机驱动模块
电路原理:微型直流电机以其杰出的线性特性、优异的操控功用和十分高的功率广泛应用于小功率体系中。为了操控直流电机,本文选用PWM操控。SPCE064A的 I/OB特别功用IOB8 、IOB9就直接供给了两个PWM输出口,直接输出操控信号即可,无须另加电路。考虑到电压、电流的等级及尺度、外观要素,本文选用L298替代三极管构成驱动电路,如图4所示。
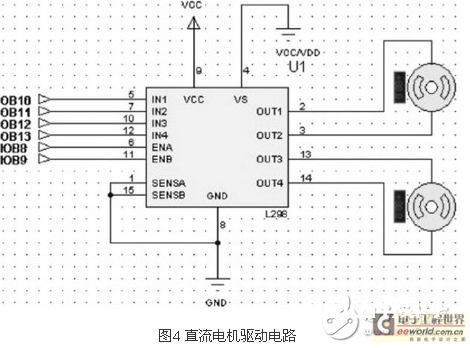
L298可一起操控两个电机,且输出电流到达2A。其ENA(引脚6)和ENB(引脚11)别离于SPCE064A的IOB8和IOB9相连,可完成直流电机的PWM速度操控。SENSEA、SENSEB为电流反应引脚,用于完成直流电机的内环电流闭环操控。
惯例的智能车一般引进输出电机的转速作为负反应行程单闭环调速体系。尽管这个闭环具有较强的抗干扰功用,转速调节器选用惯例PI调节器,但是在体系中静差依然存在,即在PI操控调节器下稳态差错只能削减而不可能消除。因而,单闭环调速体系操控作用和功用对给定稳压源和速度检测元件的精度具有依赖性。