导言
逆变电源一般选用瞬时反应操控技能来进步逆变电源的动态呼应速度,削减输出电压的谐波含量,改进输出电压波形的质量。常见的逆变电源操控技能,有重复操控、谐波补偿操控、无差拍操控、电压瞬时值操控和带电流内环的电压瞬时值操控等类型。其间,带电流内环电压瞬时值环路的双环操控办法因完成简略,体系动态功用优越和对负载的适应性强等长处,而逐步成为高功用逆变电源的发展方向之一。但传统操控办法是依据逆变电源直流侧输入电压为无脉动直流电压的假定,而实践逆变电源,存在因电网电压动摇或负载骤变而导致直流侧电压动摇的现象。直流输入电压动摇会引起逆变器开环增益动摇,然后影响输出电压质量。在传统双环操控的基础上,添加输出电压有用值反应环的三环操控战略,在必定程度上消除了直流输入电压动摇导致的输出电压稳态差错,但有用值环对输出电压改动的呼应速度较慢,操控进程杂乱。
此外,正弦脉宽调制逆变电源开关管作业在硬开关状况下,将产生很多的高次谐波,使变换器及负载的损耗加大,设备使用寿命下降,乃至或许引发并联或串联谐振,损坏电气设备以及搅扰通信线路的正常作业。软开关技能是战胜以上缺点的有用办法之一。选用HPWM调制可完成ZVS软开关技能,在不添加硬件和改动变换器拓扑的前提下,可使用现有元器件和开关管的寄生参数,发明逆变桥开关管ZVS软开关条件,然后最大极限地完成ZVS。
本文针对直流侧电压扰动时双环操控逆变电源的输出电压波形产生畸变、幅值产生改动的现象,提出了通过输入电压前馈操控环来批改基准正弦信号的幅值,然后改进逆变电源输出电压质量的三环操控办法。一起,借助于DSP强壮的运算才能和丰厚的外设,完成HPWM逆变电源的数字操控,然后简化了硬件电路。仿真成果表明,本文所提出的操控战略简略有用,可有用地进步逆变电源在直流输入电压扰动下的动态功用和稳态精度,并下降了输出电压的总谐波。
逆变电源体系建模
单相全桥逆变电源的主电路结构如图1所示,直流输入电压Ud经逆变桥后得到脉冲输出电压Ui,再经LC滤波后得到正弦输出电压Uo。
由逆变桥平均值模型可知:当三角载波频率fc远高于输出正弦波基频f时,逆变桥输出电压Ui在一个载波周期Tc的平均值 ,可近似当作输出电压基波重量的瞬时值Ui1,即

式中:Ud为直流输入电压;UCm为三角载波幅值。令kPWM=Ud/UCm表明正弦调制信号通过逆变桥的增益,因Ud改动而引起的kPWM改动界说为搅扰变量。依据电压瞬时值外环和电容电流内环的双环操控体系如图2所示。电压瞬时值外环选用PI调理,%&&&&&%电流内环选用P调理。开关频率为20kHz,依据转机频率ωn1=ωc/10、阻尼系数ξ=0.3,可得输出滤波器参数为:L=670μH、C=47μF。操控器的仿真参数为:Kv=0.0015,Ki=0.05,kvp=0.098,kvi=350,kip=20。

图1
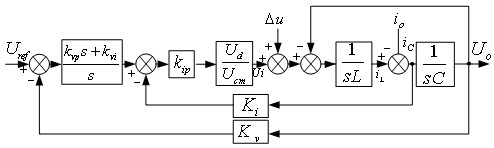
图2 逆变电源双环操控框图
考虑逆变电源对输入电压扰动的瞬态呼应功用,令Uref=0,io=Uo/R,则可得出输出电压Uo对直流电压扰动Δu的传递函数:

由式(2)可知,体系对直流输入电压阶跃呼应的调理时刻Ts为5ms。因而,当逆变电源输出电压频率为400Hz时,体系的调理时刻继续两个正弦周期,但因呼应峰值较小,对输出电压波形不会形成显着影响。而当逆变电源输出电压频率为50Hz时,呼应峰值会集呈现在1/4正弦周期内,使输出电压波形呈现失真。
直流电压前馈操控原理
由以上剖析可知,双环反应操控逆变器,对直流输入电压改动的调理有必定的滞后性和稳态差错。为此,本文提出用输入电压前馈环实时检测直流输入电压,对逆变桥增益kPWM进行补偿,抵消直流输入电压Ud动摇对逆变电源的影响。因而,在传统双环操控体系中,额外直流输入电压U*d除以采样得到的直流输入电压Ud,再与经双环校对的正弦信号ugm相乘后得到调制信号u′gm,将其送入PWM产生器,如图3所示。
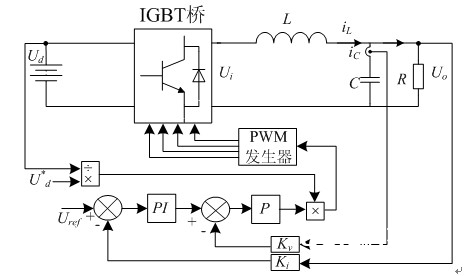
图3 逆变电源直流电压前馈操控原理图
将调制信号ugm(t)=U′gmsinωt代入(1)式中可得:

其间:m′=U′gm/UCm即为补偿后的调制比。为了确保直流电压的使用率,体系需求坚持很高的调准则,即m接近于1,也即Ugm接近于UCm。
HPWM调制原理
混合式脉宽调制方法(HPWM)本质为单极性SPWM调制方法,其作业时每半个输出电压周期切换,即同一个桥臂的开关管,在前半个工频周期内作业在低频,然后半个工频周期内作业在高频,然后战胜传统单极性操控方法下,总是一个桥臂作业的开关管一起作业在高频状况的缺点,进步了开关管的使用寿命和体系可靠性。
逆变电源作业在HPWM软开关方法下的输出电压,在一个开关周期内有12种作业状况。依据输出电压正负半周作业状况的对称性,以输出电压正半周期为例,剖析单相全桥逆变电源一个开关周期内的6种作业模态,如图4所示。
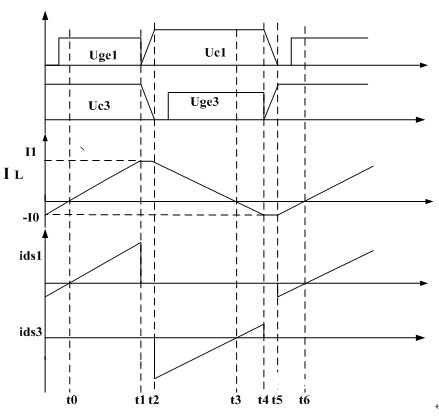
图4 HPWM逆变电源作业模态图
从t0到t1时刻逆变电源作业在形式A状况下。开关管S1和S4导通,电路为正电压输出形式,滤波电感电流线性添加,直到t1时刻S1关断停止。
从t1到t2时刻逆变电源作业在形式B状况下。在t1时刻,S1关断,滤波电感电流从S1中搬运到C1和C3支路,给C1充电的一起给C3放电。因为C1、C3的存在,S1作业在零电压关断状况下。因为该状况继续时刻很短,能够以为滤波电感电流近似不变,等效为恒流源,则C1两头电压线性上升,C3两头电压线性下降。到t2时刻,C3电压下降到零,S3的体二极管D3天然导通,电路形式B作业完毕。
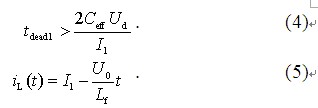
从t2到t3时刻逆变电源作业在形式C状况下。 D3导通后注册S3,所以S3为零电压注册。此刻电流由D3向S3搬运,S3作业于同步整流状况。电流由S3流过,使电路处于零态续流状况,电感电流线性减小,直到t3时刻减小到零。在此期间,要确保S3完成ZVS,则S1关断和S3注册之间需求死区时刻tdead1,而且满意以下要求:
从t3到t4时刻逆变电源作业在形式D状况下。在此形式下滤波电感Lf两头电压为-U0,电感电流开端由零向负方向添加,电路处于零态储能状况,S3中的电流也相应由零正向添加,到t4时刻S3关断,完毕D形式。
从t4到t5时刻逆变电源作业在形式E状况下。此形式状况与形式A近似,S3关断,C3充电C1放电,同理S3为零电压关断。t5时刻,C1的电压降到零,二极管D1天然导通,进入下一电路形式F,从t5到t6时刻,在D1导通后,注册S1,则S1为零电压注册。电流由D1向S1搬运,S1作业于同步整流状况,电路处于正电压输出状况回馈形式,电感电流负向减小,直到减小到零。之后,输入电压正向输出给电感储能,回到初始形式A,开端下一开关周期。同理,要确保S1零电压注册,则S3关断和S1注册之间需求死区时刻tdead2,一起满意:tdead2>2 Ceff Ud/I0,需求留意的是一般有I1> I0,因而得出tdead2> tdead1。
仿真试验成果剖析
使用Matlab/Simulink对本文规划的逆变电源电路进行了仿真验证,并选用上述原理,研发了试验样机以验证计划可行性。参数如下:直流输入电压Ud为400V±20%,额外输出电压Uo幅值为310V,输出功率1kVA,三角调制波频率为10kHz,幅值为1V,调制比0.8,THD 。
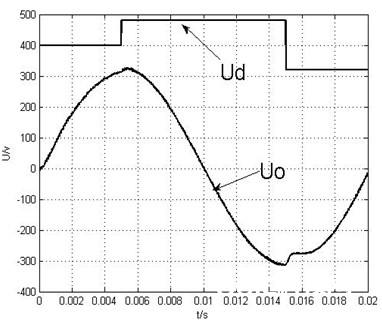
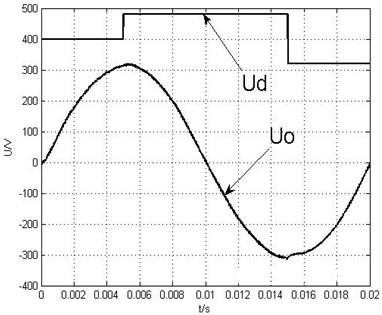
图5为当输出50Hz沟通时,Ud动摇的情况下,传统双环操控逆变电源和本文研讨的逆变电源的输出电压波形。由图10能够看出,传统双环操控,因操控器调理较慢而导致输出电压波形失真,而本文研讨的逆变电源输出电压波形坚持杰出,显着进步了体系对直流输入电压扰动的瞬态呼应功用。
(a)
(b)
图5 直流电压动摇后的输出电压波形:(a) 传统双环操控;(b) 前馈电压操控
试验测得开关管1和开关管4的驱动波形如图6所示。由图能够看出,开关管作业在HPWM调制方法下。
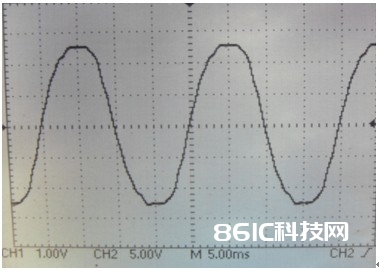
图7 阻性半载下输出电压波形
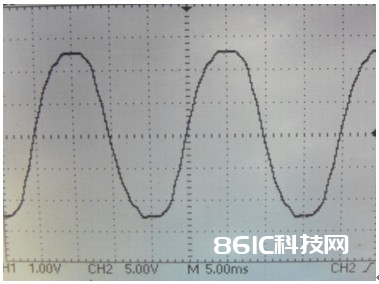
图8 阻性满载下输出电压波形
阻性半载下输出电压波形如图7所示,阻性满载下输出电压波形如图8所示。由图7和图8能够看出,负载从半载到满载改动时,输出电压的失真度较小,输出电压的幅值改动不大,体系具有杰出的稳压输出。
定论
在深入剖析传统双环操控逆变电源对直流输入电压扰动呼应功用的基础上,提出了使用输入电压前馈操控环来消除直流输入电压动摇对逆变电源功用的影响。本文使用DSP芯片的强壮功用,完成了数字式HPWM逆变电源的规划,选用HPWM的操控方法以不对称规矩采样法,有用地按捺了体系的谐波重量;一起4个开关管别离完成了软开关操控,下降了开关损耗,进步了电路功率。仿真试验成果证明,加输入电压前馈补偿环的逆变电源对直流输入电压扰动有很好的静态和动态功用。