在上星期关于Defcon的预告中,车云菌说到过将会有360的团队将会演示是怎么经过诈骗,或许说是搅扰传感器,来让车上的半主动驾驭体系做出过错的决议。
本周一,360轿车信息安全实验室负责人刘健皓与一同进行这项课题研讨的浙江大学教授/博士生导师徐文渊、浙江大学闫琛一同,在Defcon上一起进行演示,介绍了是怎么骗过特斯拉Model S上的超声波传感器、摄像头和毫米波雷达。
主动驾驭,包含现阶段的半主动驾驭,完成的进程都是经过设备在车辆上的各类传感器对车辆周围的环境进行感知,数据传到剖析处理单元,操控单元依据剖析处理单元发送的成果得到判别,然后向车辆的履行器宣布指令,做出转向、加快、刹车等不同的指令。
他们的切入点,便是在第一步,传感器感知周围环境时,做了一些四肢,让传感器得到过错的数据。
怎么搅扰传感器?
不同的传感器搅扰的办法天然不同。这次研讨的三个传感器作业原理各不相同,咱们一个一个看。
1.超声波传感器
超声波传感器在车辆上的作用是勘探障碍物,宣布超声波之后,依据接收到回声的时刻来判别与障碍物之间的间隔。特斯拉的Model S的车身周围设备有12个超声波传感器用来勘探车辆周围的障碍物,而且会在检测到有障碍物之后宣布正告声,外表盘上对应方位会有障碍物以及间隔提示。假如敞开了Autopilot,那么车辆还会在间隔过近的时分主动刹车。
影响超声波传感器的办法很简略,一种是经过宣布超声波的噪声,添加超声波传感器接收到回声的信噪比来影响它的判别;一种是宣布相同频率的超声波给超声波传感器,让它误以为本来没有障碍物的当地是有障碍物的。
完成起来也很便利,只需求一个本钱在60元人民币的搅扰设备,在车辆的超声波传感器前方宣布对应信号就能够了。从团队研讨的成果来看,假如是经过噪声来搅扰,那么会影响超声波对间隔的判别,判别成果不精准,然后显现在外表盘上的间隔信息也是过错的;而假如是经过宣布同频率的信号,那么会让传感器做出彻底相反的判别。
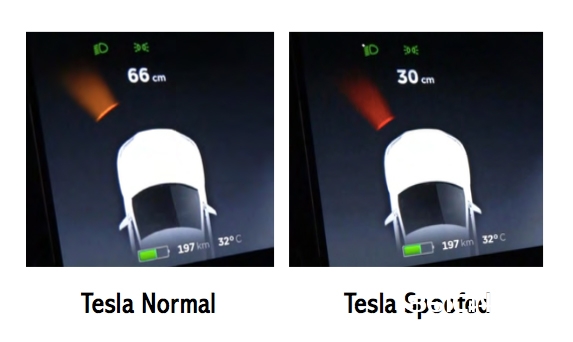 搅扰之后,传感器对间隔判别过错
搅扰之后,传感器对间隔判别过错
假如是在人工驾驭状况下,那么会被外表盘显现的过错信息而误导,而假如是在Autopilot的状况下,那么相同会被误导而做出过错判别,或许误以为体系不作业而宣布正告声,有必要由人类驾驭员接手。需求留意的是,假如是宣布同频率信号来进行搅扰,那么时刻很重要,只需第一次让传感器接收到的超声波是有用的,能够产生影响。
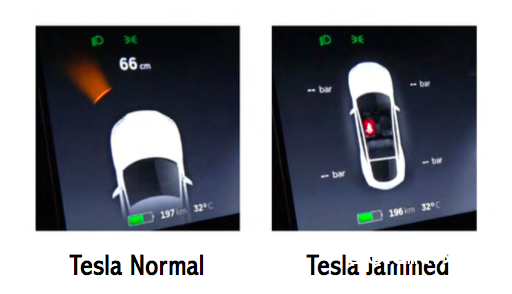 传感器未能识别出障碍物
传感器未能识别出障碍物
当然,除此之外还有一个最简略的办法,运用一些能够吸声的资料,就能够吸收传感器宣布的超声波,直接让其被停工。
2.毫米波雷达
相比之下,关于毫米波雷达的破解难度要大许多。最直接的表现就在设备的本钱上,据刘健皓泄漏,他们搅扰毫米波雷达的设备本钱在120万人民币。不过,出于安全考虑以及设备电源线长的约束,关于毫米波雷达的搅扰并非是在车辆高速运转状况下完成的。
毫米波雷达的理论搅扰间隔便是毫米波的勘探间隔,不过无线毫米波发射设备很少且本钱会更高,这也是对毫米波雷达的进犯会愈加难以发生在实践中。
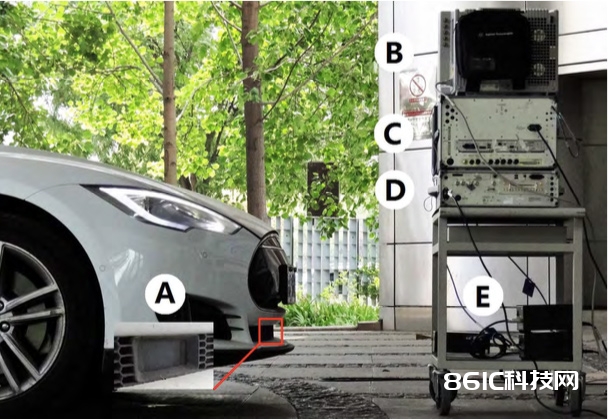 毫米波雷达的搅扰设备
毫米波雷达的搅扰设备
上图便是搅扰毫米波雷达的设备。刘健皓表明,经过电磁波的搅扰,能够在前方无车的状况下让传感器以为有车,这个信息会同步显现到外表盘上,假如间隔足够近,报警设备还会提示,相同,在Autopilot状况下,会主动刹车。相同,能够在前方有车的时分,让体系以为前方无车,而持续行进。
 搅扰毫米波雷达后外表盘的过错显现
搅扰毫米波雷达后外表盘的过错显现
与超声波雷达相同的是,相同能够经过搅扰设备来让体系进行过错的间隔判别。而不论是超声波雷达仍是毫米波雷达的间隔判别,从实践的开车场景来说,只需细小间隔的过错判别会更简单给人以误导,比方在倒车或许泊车入位的时分,更多的搅扰,是关于Autopilot这套体系。
假如传感器被严峻搅扰,在Autopilot下,体系相同会做出「传感器不能正常作业」的判别,然后无法发动Autopilot,要求进入人工状况。
3.摄像头
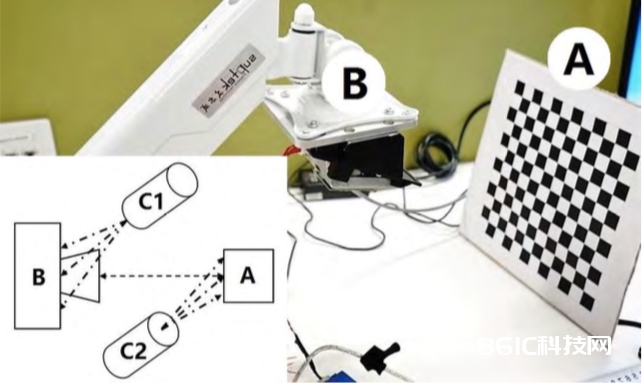
尽管现在特斯拉5月份的致死事端还没有终究确认原因,可是货车的白色集装箱对摄像头带来的「致盲」作用,正是刘健皓着手研讨的切入点。不过关于摄像头的搅扰,并没有直接在车上进行,而是将摄像头拆下。
 致盲摄像头
致盲摄像头
让摄像头致盲的手法是选用光源直射摄像头(或许直射标定板,让其反光射向摄像头),其终究的作用取决于光源与摄像头的间隔,以及光源的强度。据刘健皓介绍,在间隔摄像头50cm的方位用200毫瓦的红外线,能够让摄像头致盲40秒。假如间隔添加,作用会递减。假如光源过强,还会形成摄像头直接被烧坏。
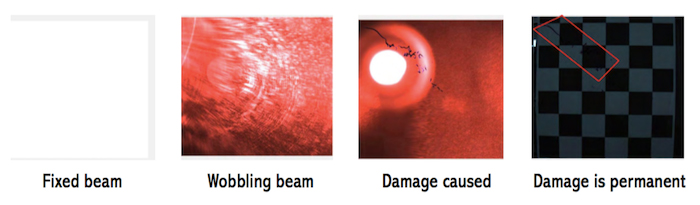 摄像头被致盲的成果
摄像头被致盲的成果
当然,间隔50cm在实践生活中是无法对行进进程中的车辆完成的,跟着间隔的拉长,能够经过添加光源强度的办法,来形成致盲。而只需致盲2-3秒,关于敞开了主动行进状况的车来说,就很或许带来严峻的成果。
从硬件来说,摄像头自身存在一个改写频率,假如改写频率够高,则会让致盲的作用削弱。
传感器能够被诈骗,这阐明了什么?
早年面的描绘中其实能够看出,从传感器下手来进行进犯,其实并不是一个很简单完成的办法。
在说到的三种传感器中,最简单完成的便是超声波了。设备本钱低,下手简单,一个充电宝就能够让其坚持作业,尽管有间隔的约束,可是除了地库之外,也能够经过跟车的办法来完成。而要致盲摄像头,一方面是间隔越远作用越差,尽管只需致盲哪怕一秒钟就或许会引起严峻的成果,可是需求一场精心策划,毫米波雷达更是如此。
之所以从传感器下手,是由于360在研讨主动驾驭进程中,偶然发现了传感器接收到过错数据对体系的影响。不过,搅扰传感器并不是底子意图,刘健皓表明,「咱们研讨的仍是主动驾驭,搅扰传感器仅仅想阐明现阶段主动驾驭的模型和算法还存在缺点,需求去处理」。挑选Model S,也是由于Autopilot能够在车辆中止时翻开,便于实验研讨。现在特斯拉也现已与360联络,两边将一起研讨这一问题。
传感器被搅扰之后体系得到过错的成果,从刘健皓的视点来看,一方面是传感器自身没有「弹性」机制,二则是在决议计划算法上,没有进行容错。以毫米波雷达为例,Model S毫米波雷达的频率与波长都是被逆向得出,假如设置了弹性机制,频率随机,那么逆向的难度天然会加大;而从算法层面来说,现在Model S尽管进行了不同传感器的数据交融,可是并没有针对反常数据有剖析进程。
在刘健皓去美国之前,车云菌在360的地下车库观看了他们对超声波搅扰的实时演示。除了过错的信息得到的过错判别之外,其实还顺带发现了别的一个问题:
在正常状况下,敞开Autopilo之后,假如车辆处于行进状况,那么后方是否存在障碍物是不会影响车辆状况。可是假如此刻将搅扰设备放在后方传感器邻近(实测3米左右就能够),那么车辆就会主动刹停。车辆倒车时,搅扰前方超声波传感器能够得到相同的作用。
 倒车时搅扰前方超声波传感器,Autopilot主动刹车
倒车时搅扰前方超声波传感器,Autopilot主动刹车
形成这一成果的原因没有得知,不过能够知道仍是出在Autopilot体系自身的判别机制上。
360和主动驾驭
很简单想到的一个问题是,360为什么开端研讨主动驾驭了?在这点上,360攻防实验室的主意和成立了Comma的黑客George Hotz相相似。
据刘健皓介绍,他们现在正在将一辆混合动力车改装成主动驾驭车辆。不过完成的手法与现在其他团队的办法有所不同。现在经过改装车完成主动驾驭相关功用的,都是经过新增履行器的办法,让履行器变成电子操控的。而履行器的技能则被一级供货商所独占。
刘健皓以为,假如要让主动驾驭遍及的话,那么能够经过软件改装的办法来完成。只需车辆的转向、动力和刹车等操控是能够电控的,那么就能够而经过逆向履行器操控协议的办法,拿到操控权。然后在加装传感器,让车辆变成具有L2辅佐驾驭功用的车辆。
关于现在的改装进展,刘健皓并没有泄漏太多。从理论上来说,这个办法是能够完成的。尽管实践操作进程中会存在许多问题,比方逆向操控协议的进程,再比方他们需求对车辆的履行操控需求有很长时刻的研讨,不过这个办法也给轿车圈带来了新的思路。
车云小结
聊到最终的时分,好像「360要研讨主动驾驭」这件工作比「搅扰传感器」更能引起车云菌的爱好。究竟搅扰传感器这事儿的完成难度摆在那里。可是不行忽视的是,主动驾驭车的安全问题正是为人们所忧虑的。在传感器之外,数据传输、V2X以及CAN总线架构,都是需求留意的节点。