一、舵机DS3115
一般来讲,舵机主要由以下几个部分组成, 舵盘、减速齿轮组、方位反应电位计5k、直流电机、操控电路板等。
作业原理:操控电路板承受来自信号线的操控信号(详细信号待会再讲),操控电机翻滚,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和方位反应电位计是相连的,舵盘翻滚的一起,带动方位反应电位计,电位计将输出一个电压信号到操控电路板,进行反应,然后操控电路板依据所在方位决议电机的翻滚方向和速度,然后到达方针中止。
舵机的根本结构是这样,但完成起来有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和翻滚之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。例如,其间小舵机一般称作微舵,同种资料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需求依据需求选用不同类型。
舵机的输入线共有三条,赤色中心,是电源线,一边黑色的是地线,这辆根线给舵机供给最根本的动力确保,主要是电机的翻滚耗费。电源有两种规范,一是4.8V,一是6.0V,别离对应不同的转矩规范,即输出力矩不同,6.0V对应的要大一些,详细看使用条件;别的一根线是操控信号线,Futaba的一般为白色,JR的一般为桔黄色。别的要注意一点,SANWA的某些类型的舵机引线电源线在边上而不是中心,需求辨认。但记住赤色为电源,黑色为地线,一般不会搞错。
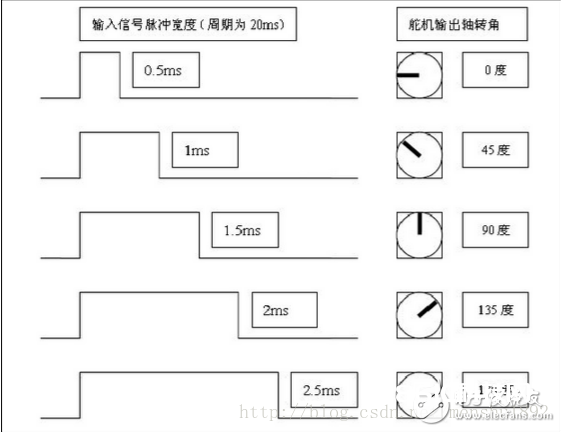
舵机的操控信号为周期是20ms的脉宽调制(PWM)信号,其间脉冲宽度从0.5ms-2.5ms,相对应舵盘的方位为0-180度,呈线性改动。也就是说,给它供给必定的脉宽,它的输出轴就会坚持在一个相对应的视点上,不管外界
转矩怎样改动,直到给它供给一个别的宽度的脉冲信号,它才会改动输出视点到新的对应的方位上。舵机内部有一个基准电路,发生周期20ms,宽度1.5ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判别出方向和巨细,然后发生电机的翻滚信号。由此可见,舵机是一种方位伺服的驱动器,翻滚规模不能超过180度,适用于那些需求视点不断改动并能够坚持的驱动傍边。比方说机器人的关节、飞机的舵面等。
二、DS3115
舵机电压为:DC4.8~6V,作业是峰值电流能够到达2~3A,所以主张购买的电源:DC5V3A电源

三、stm32
翻开pwm输出试验
int main(void)
{
u8 dir=1;
u16 led0pwmval=1;
Cache_Enable(); //翻开L1-Cache
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(432,25,2,9); //设置时钟,216Mhz
delay_init(216); //延时初始化
uart_init(115200); //串口初始化
LED_Init(); //初始化LED
//108M/108=1M的计数频率,主动重装载为500,那么PWM频率为1M/500=2kHZ
//TIM3_PWM_Init(4000*led0pwmval-1,108-1); //修正比较值,修正占空比 周期4ms 高电平2ms
while(1)
{
TIM3_PWM_Init(1000*led0pwmval-1,108-1);
delay_ms(1000);
TIM3_PWM_Init(2000*led0pwmval-1,108-1);
delay_ms(1000);
}
}