伺服电动机又名履行电动机,或叫操控电动机。在自动操控体系中,伺服电动机是一个履行元件,它的作用是把信号(操控电压或相位)变换成机械位移,也便是把接收到的电信号变为电机的必定转速或角位移。其容量一般在0.1-100W,常用的是30W以下。伺服电动机有直流和沟通之分。

伺服电机内部的转子是永磁铁,驱动器操控的U/V/W三相电构成电磁场,转子在此磁场的作用下滚动,一同电机自带的编码器反响信号给驱动器,驱动器依据反响值与目标值进行比较,调整转子滚动的视点。伺服电机的精度决议于编码器的精度(线数)。伺服电动机在伺服体系中操控机械元件作业的发动机。是一种补助马达直接变速设备。又称履行电动机,在自动操控体系中,用作履行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和沟通伺服电动机两大类。
伺服电机的调试办法
1、初始化参数
在接线之前,先初始化参数。
在操控卡上:选好操控办法;将PID参数清零;让操控卡上电时默许使能信号封闭;将此状况保存,保证操控卡再次上电时即为此状况。
在伺服电机上:设置操控办法;设置使能由外部操控;编码器信号输出的齿轮比;设置操控信号与电机转速的份额关系。一般来说,主张使伺服作业中的最大规划转速对应9V的操控电压。比方,山洋是设置1V电压对应的转速,出厂值为500,假如你只预备让电机在1000转以下作业,那么,将这个参数设置为111。
2、接线
将操控卡断电,衔接操控卡与伺服之间的信号线。以下的线是必需要接的:操控卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。复查接线没有过错后,电机和操控卡(以及PC)上电。此刻电机应该不动,而且可以用外力轻松滚动,假如不是这样,查看使能信号的设置与接线。用外力滚动电机,查看操控卡是否可以正确检测到电机方位的改动,不然查看编码器信号的接线和设置
3、试方向
关于一个闭环操控体系,假如反响信号的方向不正确,结果肯定是灾难性的。经过操控卡翻开伺服的使能信号。这是伺服应该以一个较低的速度滚动,这便是传说中的“零漂”。一般操控卡上都会有按捺零漂的指令或参数。运用这个指令或参数,看电机的转速和方向是否可以经过这个指令(参数)操控。假如不能操控,查看模拟量接线及操控办法的参数设置。承认给出正数,电机正转,编码器计数添加;给出负数,电机反转转,编码器计数减小。假如电机带有负载,行程有限,不要选用这种办法。测验不要给过大的电压,主张在1V以下。假如方向不共同,可以修正操控卡或电机上的参数,使其共同。
4、按捺零漂
在闭环操控过程中,零漂的存在会对操控作用有必定的影响,最好将其按捺住。运用操控卡或伺服上按捺零飘的参数,细心调整,使电机的转速趋近于零。因为零漂自身也有必定的随机性,所以,不必要求电机转速肯定为零。
5、树立闭环操控
再次经过操控卡将伺服使能信号铺开,在操控卡上输入一个较小的份额增益,至于多大算较小,这只能凭感觉了,假如真实不放心,就输入操控卡能答应的最小值。将操控卡和伺服的使能信号翻开。这时,电机应该现已可以依照运动指令大致做出动作了。
6、调整闭环参数
细调操控参数,保证电机依照操控卡的指令运动,这是必需要做的作业,而这部分作业,更多的是经历,这儿只能从略了。
伺服电机的挑选
1、传统的挑选办法
这儿只考虑电机的动力问题,关于直线运动用速度v(t),加速度a(t)和所需外力F(t)表明,它们均可以表明为时刻的函数,与其他要素无关。很显然,电机的最大功率P电机,最大应大于作业负载所需的峰值功率P峰值,但仅仅如此是不行的,物理意义上的功率包括扭矩和速度两部分,但在实践的传动组织中它们是受限制的。
用T峰值表明最大值或许峰值。电机的最大速度决议了减速器减速比的上限,n上限= 峰值,最大/ 峰值,相同,电机的最大扭矩决议了减速比的下限,n下限=T峰值/T电机,最大,假如n下限大于n上限,挑选的电机是不合适的。反之,则可以经过对每种电机的广泛类比来确认上下限之间可行的传动比规模。只用峰值功率作为挑选电机的原则是不充分的,而且传动比的准确核算十分繁琐。
2、新的挑选办法
一种新的挑选原则是将电机特性与负载特性分脱离,并用图解的方式表明,这种表明办法使得驱动设备的可行性查看和不同体系间的比较更便利,别的,还供给了传动比的一个或许规模。
这种办法的长处:适用于各种负载状况;将负载和电机的特性分脱离;有关动力的各个参数均可用图解的方式表明而且适用于各种电机。因而,不再需要用很多的类比来查看电机是否可以驱动某个特定的负载在电机和负载之间的传动比会改动电机供给的动力荷载参数。
较更便利,别的,还供给了传动比的一个或许规模。
这种办法的长处:适用于各种负载状况;将负载和电机的特性分脱离;有关动力的各个参数均可用图解的方式表明而且适用于各种电机。因而,不再需要用很多的类比来查看电机是否可以驱动某个特定的负载在电机和负载之间的传动比会改动电机供给的动力荷载参数。

以下将介绍一些伺服电机体系,触及永磁同步电机以及感应异步电机。
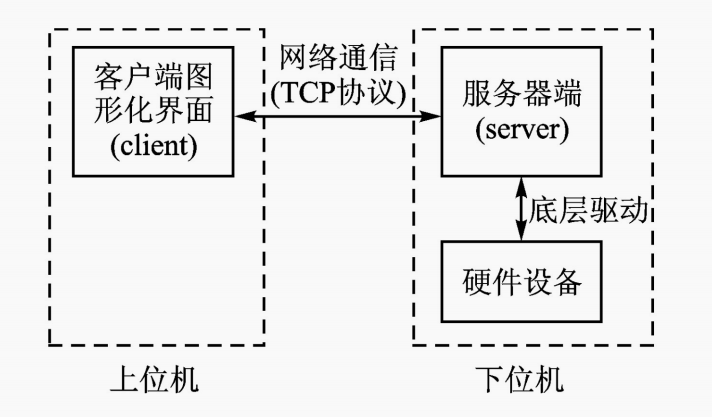
一个伺服体系,不单单是一个电机。它是一个闭环的运动体系,包括了操控器、驱动器、电仪和反响设备,一般一个还配有一个光学或磁编码器。
伺服体系能在选用永磁(permanent magnets ,PM)技能后同步机械,配以有刷或无刷PM电机,或在一个AC感应电机上树立异步机械体系。
永磁同步电机 有较高的峰值,以及继续的扭矩,适用于准确位移体系的高加速度和快速减速中的驱动伺服体系。扭矩与输入电流直接呈份额关系。电机轴速与输入的电压相关。输入电压越高,电机的速度就越高。扭矩和速度的比的曲线呈线性的。
永磁结构与电机气隙相关。如,无刷PM电机的结构,包括两个交互的磁结构,移动的转子(衔接着永磁)和定子线圈发生电磁反响,然后呈现电机的转矩和速度。
三相定子场能次序发生能量,且PM转子跟从转子场一同完结同步运动。一个特定的电子补偿体系,用于查看转子方位,并为定子线圈加能量。无刷PM电机,在所有其他的电机中成为准确位移体系的首选,除了轿车运用以及超大电机体系中。无刷PM电机是仅有的伺服电机体系,能用于闭环扭矩、速度或位移体系。
不同的转子
AC感应电机具有PM无刷电机相同的物理特性
的定子,但它的转子结构彻底不同。鼠笼结构的感应电机包括一系列的感应铝或铜条,放置在转子结构中,衔接在结尾线圈。
这些短转子条与定子的旋转磁场互有电磁耦合感应,发生一个新的转子场,并与定子场彼此反响,构成转子运动。
在同步的定子和较慢的定子场,与实践的速度之间有差异。这个速度的差异便是所谓的滑差。输入的频率决议了电机的速度。
例如,一个60 Hz、南北极的AC感应电机,无负载时的速度近3,600 rpm,一个四极AC电机运转速度低于1,800 rpm,依据滑差值的不必而有所不同。当电机开端转矩时,滑差添加,速度下降。
AC感应电时机输出更多的转矩,跟着速度的下降,直至负载到达毛病点,此刻电机速度会遽降至零。一个固有的AC电机功能特点是,开始的转矩较小,有必要在电机开始时卸去负载。
跟着20世纪80年末变频器电子驱动的呈现,电机特有的转矩-速度功能曲线,也发生了很大的改动。变频器的功能是,一同改动电压和频率,运用可调理或可改动的速度驱动,就能从头构建了转矩-速度曲线,AC感应电机是速度体系的首要环节。

怎么运用
驱动技能在功能上的继续进步,将无刷PM和AC感应电机,也带入了驱动商场的竞赛,可是无刷PM电机仍然在操控领域中占主导地位。AC感应电机不适应在低速和高速中运用。
在伺服位移体系中运用一个无刷PM电机,一般选用50 kW (67 hp)或更高的功率的体系。AC感应电机一般在恒速或变速体系中。混合的计划体系比较罕见。其他电机也能部分完成,可是在功能上超越AC感应电机或无刷PM电机的计划较少。
无刷PM电机在速度操控中,对1 kW (1.37 hp)的DC有刷电机的速度操控或更小功率的运用商场中造成了必定的冲击。而AC感应电机则掌控了大部分的大于1MW的运用。