摘要 介绍了以单片机AT89S52为操控中心的智能简易车辆体系规划方案。体系依据视点传感器检测的信号,操控小车在跷跷板上做相应运动,其间选用视点传感器感应板面水平角是否为零,确保小车抵达平衡。一起选用反射式光电传感器感应板面引导线,确保小车不脱离轨迹,并指引小车在规则区域人忱爬上板面。体系显现装置选用RT1602液晶显现器,可以实时显现行距、时刻;小车动力源选用步进电机,并用SFA475集成晶体管芯片构成的桥式电路对其驱动,电源直接由12 V蓄电池供电,单片机依据各模块检测的信号作出判别,确保小车正常举动。
智能车辆是一个集环境感知、规划决议计划、主动行进等功用于一体的归纳体系其会集运用了计算机、传感、信息、通讯、导航、人工智能及主动操控等技能是典型的高新技能归纳体。本文规划的智能简易车辆体系便是此归纳体的一种测验。该体系使智能简易车辆在多种传感器的合作下完成了主动寻迹、平衡勘探等功用,已根本完成了车辆的智能化。
1 智能简易车辆电路整体结构规划
文中简易智能车辆体系经过电动车跷跷板这一试验完成。选用AT89S52作为电动车跷跷板的操控中心,用红外传感器检测小车是否在拟定轨迹上运动,小车若违背轨迹,传感器便会宣布一个信号送至单片机,使单片机操控步进电机的滚动。一起经过视点传感器来辨认小车是否抵达平衡位置。
整体电路体系包含主机操控模块、平衡检测模块、寻轨检测模块、显现模块、电动驱动模块及语音提示模块6个部分。主机操控模块是该电路体系的中心,将平衡检测模块和寻迹模块检测到的信号进行运算处理,输出给电机驱动模块来操控左右电机,然后操控小车的行进及撤退。一起,主控模块还会输出操控信号至显现模块以显现行距及时刻,并操控语音提示模块适机宣布提示音。电路体系框图如图1所示。

2 电硬件规划
2.1 主机操控模块
主机操控模块选用ATMEL公司出产的低电压、高性能8位单片机AT89S52,该单片机内含8 kB可重复擦写的只读存储器和256 Byte的随机数据存储器,其特点是高密度、非易失性存储、微功耗,体系安稳及可靠性高。此外,AT89S52技能老练,价格低廉,参阅资源丰富,且运用也较为广泛,再加之本体系能使该单片机资源得到充沛的运用,故挑选其作为智能小车电路的中心操控。
2.2 显现模块
显现模块运用16位字符型液晶(LED)显现。液晶显现屏具有低功耗、平面直角显现、可视面积大、画面作用好、分辨率高、抗干扰能力强的长处。并可直接运用单片机上I/O口,无需过多的外围器材便可完成多项功用。
2.3 电机及驱动模块
电机及驱动模块中的电机部分选用步进电机,该电机力矩大,精度高,只接纳一个脉冲。就可滚动一个固定的视点,因而运用晶体管组成的桥式驱动电路,单片机可较好地操控步进电机的速率、旅程、转向等,可抵达精细操控,且体系也较为安稳。此外因为体系对电机的精度及其灵敏度要求较高,而步进电机和该驱动电路的组合彻底可抵达这一要求,故选用步进电机和驱动电路。
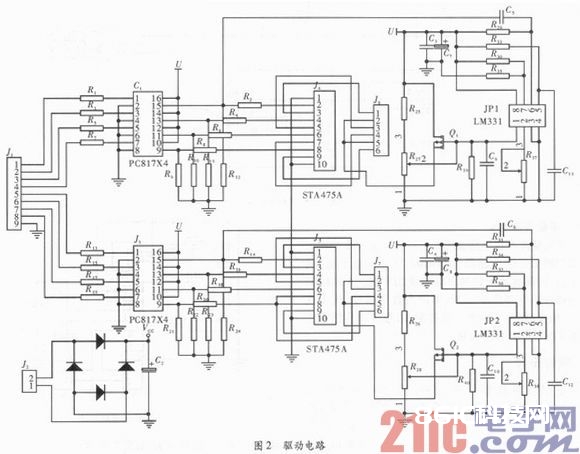
驱动电路如图2所示。驱动模块是本规划的动力源,为此在信号线与主控板接口相连前,选用光耦器材PC817进行阻隔,避免电路中大电流焚毁主控板器材;考虑到步进电机的输出力矩随作业频率下降较快,而低频时所需的电压又过低,若选用较高的电压有或许焚毁步进电机的驱动,为此要完成小车的准确操控对驱动则有必定的要求,需根本满意衡力矩输出。STA475A是一款电机驱动芯片,广泛运用于打印机及各种驱动操控板上,其NPN型的达林顿管。在此选用频率电压转化电路来补偿步进电机高频作业时所需的电压。V/F转化器材LM331的作用是将频率信号转化为电压信号,用此信号来操控大功率限流场效应管,确保驱动电流不会因频率过高而减小,以恒力矩输出,然后确保电动机的力矩能带动电动车顺畅运转。
2.4 寻迹模块
主动寻迹是依据主动扶引小车(Auto-Guided Vehicle,AGV)体系,完成小车主动辨认道路,判别并主动躲避妨碍,以挑选正确的行进道路。其选用与地上色彩有较大不同的线条作为引导,并运用传感器感知扶引线和妨碍判别。
完成机器人的视觉和挨近觉功用有多种方法:(1)可运用CCD摄像头进行图画收集和辨认方法,但不适用于小体积体系,且还触及图画收集、图画辨认等范畴。(2)电容式挨近传感器,依据检测目标外表挨近传感元件时的%&&&&&%改变。(3)超声波传感器,依据波从发射到接纳的传达进程中所遭到的影响来检测物体的挨近程度。(4)红外反射式光电传感器,其包含一个可发射红外光的固态发光二极管和一个用作接纳器的固态光敏二极管。
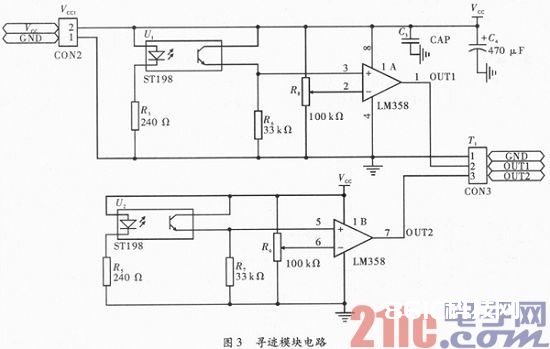
体系的寻迹检测模块选用反射式红外传感器来检测跷跷板上的黑线,因为黑线可用黑笔直接在跷跷板轨迹上画出,故可不考虑其质量对跷跷板的影响。红外传感器发射和接纳均是不可见光,抗干扰能力强,灵敏度高,一起尺度小、质量轻、外围电路简略,装置便利,因而用其作为近距离检测是较抱负的。寻迹模块电路如图3所示,集成反射式光电传感器ST198的电压驱动为4.5~5 V。当发射二极管导通时,宣布红外光线,使接纳管的集电极和发射极间电阻变小,而比较器正向输入端电位被拉高,当红外光线照射到黑色线上时,反射光较少,接纳管集电极和发射极间的电阻增大,则比较器正向输入端电位被拉低,单片机依据此信号操控电机的正反滚动。
2.5 平衡检测模块
平衡检测模块电路如图4所示。选用ADI公司出品的双轴加速度传感器ADXL202,该产品成本低、功耗小,且内部灵敏元件和后续电路相集成。ADXL202传感器外围电路简略,一起输出为数字信号,抗干扰强、灵敏度高、易于用单片机操控,故挑选该传感器作为本体系的平衡检测模块。