导言
跟着科学技能和制造技能的不断发展前进,数字操控的雕琢机逐渐成为雕琢职业的专用工具。数控雕琢机从加工原理上讲是一种钻铣组合加工,是一种典型的机电一体化产品,在模具雕琢、广告制造、装潢等职业有着广泛的商场运用。
现在商场上的数控雕琢机操控器硬件渠道所用的微处理器首要包含:以8位单片机为内核,这类产品的价格低廉,规划比较简单,可是有功用单一、功用差、功率低、存储容量小、独立工作能力较弱、有用功用不强、定位精度不高、人机交互杂乱、操作不便利等缺点;以DSP为内核,这类雕琢机具有较强的功用及功率,实时性较强,本钱适中,可是功用仍是比较少,相同短少独立工作能力,无法满意人机交互界面、外围电路接口、网络等方面的要求。
本文提出了运用32位ARM9处理器与FPGA相结合来替代上述单片机与工控机的联机操控,以Windows CE.net操作体系为渠道,由ARM完结速度操控, FPGA完结轨道操控。在轨道操控中结合了步进电机的转矩-频率特性,使电机的轨道准确而且平稳。整个操控体系一体化完结从原始数据读取到终究操控信号的输出,完全摆脱了对工控机的依靠;经过操控键盘设置不同的脉冲当量及电机运转参数,可与适用于各种场合的雕琢机床相配合运用,操控精度高、通用性强。
操控体系规划
一个嵌入式体系必定是由嵌入式硬件和嵌入式软件组成;嵌入式硬件首要包含嵌入式处理器、外设操控器、接口电路等;嵌入式软件首要包含发动程序、嵌入式操作体系、运用软件等。嵌入式处理器是嵌入式体系的硬件中心;嵌入式操作体系是嵌入式软件的中心。
硬件体系
硬件体系首要由以下三个部分组成:
(1)处理器(ARM9):作为操控器的处理器,在ARM上移植了Windows CE.net操作体系,人机互动方面要完结对LCD显现的操控和读取操控键盘的操控指令;在雕琢方面要完结对原始数据的读取(经过USB接口)、预处理、剖析和核算,并将核算成果传递给FPGA,与FPGA协同完结对步进电机的操控。
(2)FPGA:对接收到ARM宣布的数据进行插补运算,并依据插补成果核算出操控步进电机的脉冲数目和延时,终究完结对步进电机的操控完结三轴联动的雕琢。
(3)人机交互界面:人机交互界面首要包含了键盘和LCD。简直一切关于雕琢的信息都实时的显现在LCD上;机床的脉冲当量以及雕琢最大速度和加快度等参数则是经过键盘设定的,一同在雕琢中键盘还能够依据需求输入特别指令。
硬件体系整体结构如图1所示。整个硬件中心为依据ARM920T的三星S3C2440处理器,调配有64MB SDRAM作为体系的内存,128MB FLASH作为体系的外存,相当于硬盘,以便在断电后保存各种体系程序以及调试下载电路。外围辅佐设备包含USB接口:大部分加工文件保存在U盘中,需求读取时从U盘调入,以节约FLASH存储空间;触摸式LCD:用来供给体系的显现以及操作;网络接口:用来供给网络服务,便利长途更新程序;操控键盘:用来供给加工时所需的操作,包含点控、起停和加减速等。与上位机通讯经过串口或许USB接口,可完结在线调试或许在上位机中显现实时信息。FPGA与ARM以及过桥板相连,从ARM中获取数据并转换成操控信号,经过桥板扩大电路扩大,发送到步进电机的操控电路中。
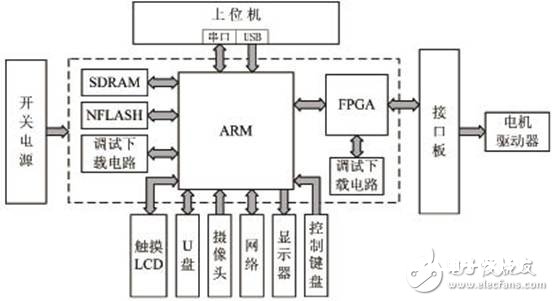
图1 硬件体系整体结构
软件体系
体系的软件选用了嵌入式实时多使命操作体系Windows CE.net。依据雕琢机操控体系的需求,体系使命模块能够分为:人机界面模块,USB接口模块和雕琢操控模块。其间人机界面模块包含LCD显现和键盘指令的读取;经过USB接口模块读取原始规划数据;雕琢操控模块对读取的数据剖析核算后完结速度操控和轨道操控。软件结构图如图2所示。
操控体系中,ARM经过对规划数据的剖析和核算完结速度操控,FPGA经过插补运算完结轨道操控。操控体系运用程序流程图如图3所示。
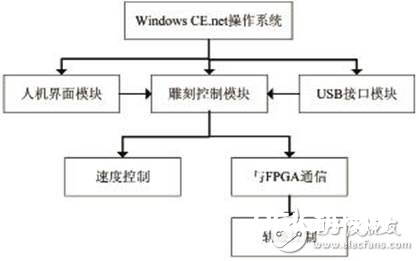
图2 体系软件结构图

图3 操控体系运用程序流程图
(1)读取数据,找出可在速度不呈现骤变的状况下可雕琢的最小单位的线条数,称之为判“S”。别离核算“S”中各轴的位移总量,界说“Sx”,“Sy”和“Sz”别离为x,y和z轴的位移总量。
(2)依据操作设置的雕琢最大速度和加快度,核算出该段位移中各轴的速度重量和加快度重量。
(3)判别其时数据处于哪种速度段,依据不同的状况核算各段位移的加快、匀速、减速段的脉冲数和各速度段的初始频率等这些数据,并把数据发送给FPGA。
(4)FPGA依据接收到的数据进行插补运算,终究操控步进电机的转速,完结三轴联动。
雕琢机接连轨道操控
在数控加工中,运动操控器经过插补算法来操控刀具相关于工件以必定的速度,依照给定的途径运动切屑出零件概括。插补技能是数控体系的中心技能,它首要处理操控刀具与工件运动轨道的问题。本体系的插补运算是在以ARM9为中心的嵌入式处理器中完结的。
以二维根本直线条的插补运算为例,首要依据脉冲当量,别离核算出XY轴各自的总待发送脉冲数mx和my。设定XY中脉冲数较多者为根底轴并将其作为参阅轴,意图在于选取一个安稳的参阅轴,以便利各脉冲发送的核算。实践运算时(以X轴为根底轴),依据加工速度以及脉冲当量,核算出根底轴发送脉冲的频率f,在每一个时刻距离内,均发送一个根底轴脉冲并累加发送次数m。
其时,则在
式1
时,发送一次短轴脉冲。其时,则需求在 ([ ]为取整运算)后,延时后发送一次短轴脉冲。在式1中,倍数n亦能够看作是短轴的计数器,则当m=mx,即n=my时,插补运算结束。该数字积分法脉冲发送示意图如图4所示:
在图4(a)中,线段XY两轴份额为2:1,假如描写动点依照既定途径运动,则XY两轴运动速度比为2:1。依据步进电机的操控规则,操控两轴的脉冲频率比同为2:1,且两轴脉冲发送数量比为2:1。依据上面的数字积分插补算法,首要核算出X轴的脉冲发送频率,在每一个时刻距离内,均发送一个根底轴脉冲,而且每隔2个根底轴脉冲即发送一个短轴脉冲,然后使短轴脉冲的频率为0.5,当根底轴发送结束时,短轴脉冲亦发送结束,数量与核算得出的相符。当两轴份额为3:2时,如图4(b)所示,则在每1.5个根底轴脉冲发送后发送一个短轴脉冲,有用的确保了脉冲发送份额,然后确保了描写线段的精度。
圆弧插补时,首要依据圆弧答应半径差错er核算出拟合弦长:
(r为圆弧半径) 式2
再依据拟合弦长l核算出对应的圆心角:
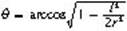
式3
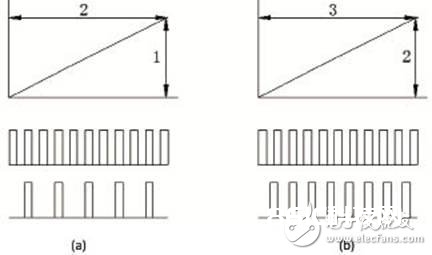
图4 插补算法脉冲发送示意图
经过弦长对应的圆心角将原圆弧从头划分为多条拟合直线,然后经过直线插补的方法完结圆弧描写。
该运算方法不再依靠每一次计数器的累加运算,而是依据速度矢量组成原理,经过操控各轴脉冲的发送份额,使组成点依照加工轨道的方向运动,到达加工意图,避免了重复性的积分累加运算,能够一次性将一切脉冲数据运算结束,只需依照必定的频率发送即可。
插补算法的程序流程图如图5所示:
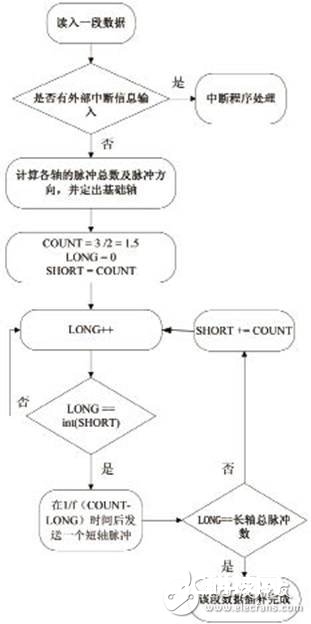
图5 数字积分法插补流程图
首要判别是否有外部中止信息输入,包含体系需求中的机械信号,如机床原点、工件加工原点、换刀、主轴调速和断电维护等输入/输出信号等,以及操作人员输入的暂停、中止加工、人为加、减速操控等信息。中止程序响应时需求维护好程序现已运算出的相关要害信息,包含读取的加工阶段数据信息以及现已加工的阶段方位信息。
其次依据脉冲当量的界说:相关于每一脉冲信号的机床运动部件的位移量,得各个加工轴脉冲总数为:

(其间l为每一轴的长度重量)
式4
并选出具有最大加工脉冲数的轴作为根底轴。电机操控器还需求脉冲的方向信息,脉冲方向由事前约定好的方向规则来确认,可经过读入的数据文件判别。插补核算初始化阶段设置各计数参量初始值,如图5数字积分法插补流程图中所示,COUNT存储根底轴与短轴之间的份额值,其数值为:根底轴脉冲数/短轴脉冲数;LONG为根底轴的累加核算变量,根底轴每发送一个脉冲,其值加1;SHORT为短轴的累加核算变量,初始化阶段将COUNT的值赋予SHORT。每次插补运算以根底轴发送一个脉冲开端,并累加LONG中的值;然后断定LONG的值与SHORT值的整数部分,当两者持平时,标明此刻将发送一个短轴脉冲,不等时则持续发送一个根底轴脉冲。发送短轴脉冲时,因为短轴的脉冲是跟从根底轴发送,所以核算其继根底轴发送后,所需的延时发送时刻,其延时数值为1/f(SHORT-LONG),并将COUNT的值累加到SHORT中,新的SHORT值作为下一次发送短轴脉冲的判别基准。每次核算各个发送轴后,都将发生一组固定的信息:脉冲发送标志位,脉冲延时时刻和脉冲方向标志位,这些信息将被进一步加工生成发送到FPGA中的操控脉冲信息。
成果剖析
将ARM作为主运算处理器时,其上不只要运转插补程序,进行实时的加工信息读入、速度操控预算以及脉冲发送的核算,一同还要运转后台操作体系,并处理用户输入信息,假如再在其上设定延时程序并操控脉冲发送,则ARM的运算担负将变得过重。因而,选用FPGA协处理运算计划,辅佐ARM进行脉冲的延时发送。
设FPGA的频率为

,则其进行一次基数累加核算时刻为

,电机的其时履行速度为Vs,脉冲当量为,则其时的发送脉冲的频率为:

式5
则此刻每个脉冲的距离换算为FPGA的累加次数则为:

式6
在加减速阶段,选用指数方法,其间根底轴每一段的频率改变为事前核算好的,即式6中的fs为特定值,而关于短轴来说,其延时发送频率值可由核算时运用到的公式1/f(SHORT-LONG)求得,即每一步脉冲的频率用式6即可确认。ARM在核算每一次脉冲的发送时,需求将脉冲的延时计数次数同时核算,然后与脉冲发送的方向一同送到FPGA中。步进电机操控器对操控脉冲的持续时刻有必定要求,设其需求的脉冲持续时刻为TP,则FPGA中,脉冲的持续时刻计数:

式7
FPGA经过送来的脉冲方向以及脉冲计数次数,即能够计数延时的方法,将此脉冲依照理论的核算频率发送至步进电机操控器,完结对电机操控器的操控脉冲发送。发送的操控波形图如图6所示:
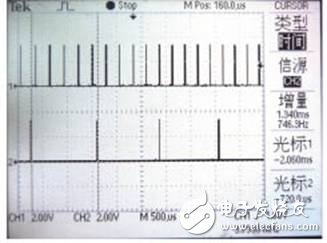
图6 各轴脉冲发送波形图
由图6能够看出,该插补算法不只发送脉冲均匀且成份额发送,短轴可依据自己的频率改变规则对电机进行操控。
结语
依据雕琢机的实践需求和步进电机的转矩-频率特性,开宣布了依据嵌入式的数控雕琢机操控体系。该体系硬件上以ARM与FPGA为中心,软件上以Windows CE.net操作体系为渠道,结合步进电机的固有特性和插补程序,使得雕琢机三轴联动完结各种雕琢文件。实践标明,该操控器能够脱离工控机的支撑,独立完结对原始规划数据的剖析和核算,并终究经过插补算法操控电机完结雕琢,在雕琢过程中能够准确的做到速度操控和轨道操控。