电子年代,硬件在日新月异的开展,频率不断上升,现在的STM32系列,Cortex M系列,Cortex-M4的频率现已为:180MHz了,基本上与之前的ARM7/9频率差不多了,还有Cortex-M7,频率更高,呈现了BGA封装与SDRAM DDR等。看来处理器越来越大众化了,物联网上的电子设备联网,也越来越遍及了,硬件本钱不断下降是大势所趋,因而,作为一个电子规划人员,仍是要不断的学习把握更多的技术知识与根底,然后不会被社会很快筛选。
最近买了一个现成的STM32F429 Discovery 的开发板,想测验一下较大点的嵌入式操作体系如RTEMS的移植与运用。由于有了STM32F103/107的根底,了解了硬件与固件库,STM32F429其实很简单下手。下面就先守时器中止点个LED试下吧,主要是要安排好工程目录。
我是依据之前一向运用STM32F103的工程目录改了一下,运用STM32F4XX的最新固件库V1.6.1,至于为何不去直接操作寄存器,我想,尽管自己是硬件身世,搞寄存器更深化的了解处理器,可是,究竟寄存器过多,有了库,能够封装一下,这样更能够快速的上手。假如需求检查寄存器,也是能够查的。用固件库能够少一些过错,究竟咱们是做运用的,首先要学会运用CPU来完成咱们要的功用。
工程目录如下:这儿运用最新的Keil MDK V5.17版别的,STM32F4XX的器材库等还需求进一步下载。这儿运用的是自带的ST-Link下载程序,当然运用Jlink也是能够的。
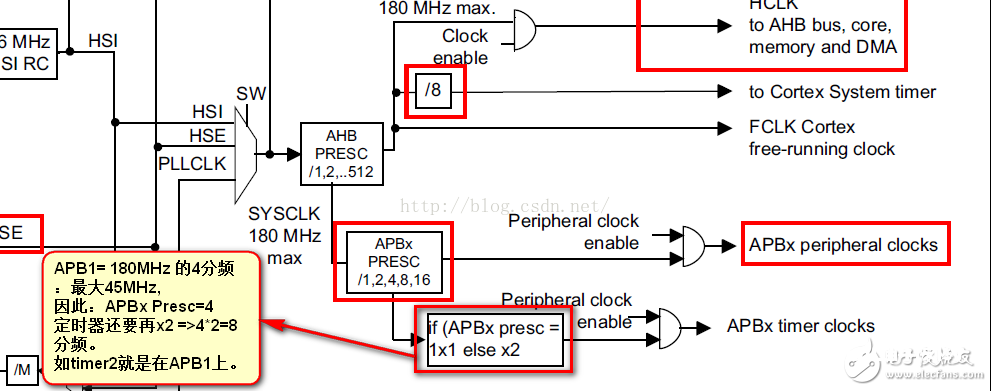
STM32F429的体系守时器,原来是体系时钟180MHz的8分频,这个能够看一下STM32F4XX的参考手册,里边时钟RCC部分的结构介绍。我这儿为了守时为1S,因而计算了一下。
以下为TIm2.c的主程序。TIm2.h 仅仅函数声明。
/********************(C)COPYRIGHT2016**************************
*文件名:TIm2.c
*描绘:守时器TImer2测验例程
*试验渠道:STM32F429ZIT6
*库版别:V1.6.1
*
*编写日期:2016-05-02
*修正日期:
*作者:
****************************************************************************/
#include“Tim2.h”
/*
*函数名:TIM2_NVIC_Configuration
*描绘:TIM2中止优先级装备
*输入:无
*输出:无
*/
voidTIM2_NVIC_Configuration(void)
{
NVIC_InitTypeDefNVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
NVIC_InitStructure.NVIC_IRQChannel=TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/*TIM_Period–1000TIM_Prescaler–(22500-1)–》中止周期为
((1/180000000)*8)*22500*1000=1S1秒守时器*/
voidTIM2_Configuration(void)
{
TIM_TimeBaseInitTypeDefTIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
TIM_DeInit(TIM2);
TIM_TimeBaseStructure.TIM_Period=1000;/*主动重装载寄存器周期的值(计数值)*/
/*累计TIM_Period个频率后发生一个更新或许中止*/
TIM_TimeBaseStructure.TIM_Prescaler=(22500-1);/*时钟预分频数(180M/8)/22500*/
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;/*采样分频*/
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;/*向上计数形式*/
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
TIM_ClearFlag(TIM2,TIM_FLAG_Update);/*铲除溢出中止标志*/
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM2,ENABLE);/*敞开时钟*/
//RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,DISABLE);/*先封闭等候运用*/
}
/*
*函数名:TIM2_Config
*描绘:TIM2装备
*输入:无
*输出:无
*/
voidTIM2_Config(void)
{
TIM2_Configuration();
TIM2_NVIC_Configuration();
}
/*******************(C)COPYRIGHT2016*ENDOFFILE************/
以下为:led.c的文件。
/********************(C)COPYRIGHT2014***************************
*文件名:led.c
*描绘:led运用函数库
*试验渠道:
*硬件衔接:———————–
*|PG14-LED1(RUN)|
*———————–
*库版别:ST3.5.0
*编写日期:2014-11-04
*修正日期:
*作者:
****************************************************************************/
#include“led.h”
/*
*函数名:LED_GPIO_Config
*输入:无
*输出:无
*/
voidLED_GPIO_Config(void)
{
/*界说一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDefGPIO_InitStructure;
/*敞开LED1的GPIOx的外设时钟*/
RCC_AHB1PeriphClockCmd(RCC_LED1,ENABLE);
/*选择要操控的LED1GPIOx引脚*/
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_LED1;
/*设置引脚形式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_OUT;
/*设置引脚速率为50MHz*/
GPIO_InitStructure.GPIO_Speed=GPIO_Fast_Speed;
/*设置为推挽输出形式*/
GPIO_InitStructure.GPIO_OType=GPIO_OType_PP;
/*设置为上拉*/
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP;
/*调用库函数,初始化LED1 的GPIOx*/