压电MEMS经过单片即可完结微履行、能量搜集、传感和无线通信,是运用潜力巨大的热门技能。压电MEMS微履行器可以准确、自主地履行杂乱动作如直线、旋转、加速度、钳动等,以此完结对极微小器材与结构的纳米标准准确操作。因而,压电MEMS微履行器不光可以满意集成微体系(IMS)对自测验性、微定位性和片上操控性的苛刻要求,一起可以满意集成微体系对输出力矩/体积效能比、响应速度、分辨率、功耗、集成度方面的需求。
2015年开端,以集成微体系使命需求为牵引,经过问题定位、技能分化,确立了依据PZT资料的MEMS微履行器研讨,现在取得的研讨开展包含以下几个方面:压电 MEMS 多自由度微振荡台技能、MEMS惯性传感器自标定技能、MEMS压电微马达技能与PZT资料与微履行器长时间安稳性研讨。
1 压电MEMS多自由度微振荡台技能
压电MEMS微履行器的规划难点包含了大位移与低驱动电压之间的约束、驱动负载功率与履行器薄型化之间的约束、不可避免的工艺差错带来的功能退化。针对上述功能进步难点,在不断的探究过程中构成和开展了位移扩大组织规划、叠加模态去耦规划、负载带宽优化等相关技能。一起,依据多次序的流片与规划、地图彼此调整的探究经历,完结压电多自由度微振荡台数学模型研讨,树立工艺参数与器材功能的映射联系,一起结合器材规划优化,完结器材规划与工艺制备的协同优化,取得压电微履行器安稳工艺流程与优异器材功能。
如图1所示,制得的多自由度微振荡台芯片,在位移/电压、履行器厚度方面处于世界抢先水平。而微履行器薄型化、低电压、位移等目标的前进关于后续集成和运用具有重要含义。目标比照见表1。
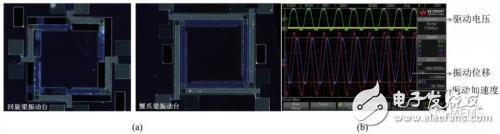
图1 (a)不同结构微振荡台与(b)动态测验成果
表1 微振荡台功能参数及比照
2 MEMS惯性传感器自标定技能
MEMS惯性传感器自标定技能首要经过在MEMS惯性传感器外部集成压电微振荡台和集成阵列化检测结构完结闭环操控才能,可以供给多轴高精度动态运动特征,然后完结MEMS惯性传感器运用前原位无自损标定。经过对MEMS惯性传感器零位与标度因子的漂移、非灵敏轴互耦差错、陀螺仪加速度灵敏度等参数获取,在运用前对长时间漂移的差错进行自动补偿,可以从根本上下降对传感器长时间安稳性的要求,大幅度下降其本钱,极大地拓宽MEMS惯性传感器运用范畴。一起,这种原位自标定技能具有通用性,可以完结对不同类型与结构的MEMS惯性传感器包含加速度计、陀螺仪以及IMU的无损原位自标定。
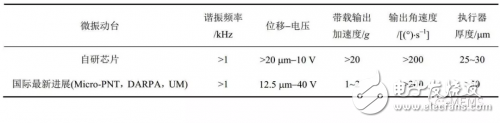
依据多自由度微振荡台的开展,现在已完结MEMS加速度计和陀螺仪的自标定流程验证。并选用光学阈值检测办法,处理阵列化高精度贴片工艺技能与弱小电流检测电路规划制备问题,可完结多自由度微振荡台阵列化高精度检测,下一步希望完结10 nm的振荡位移精度检测。光学检测样片与检丈量随位移的改变如图2所示。
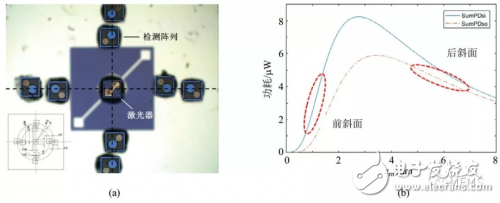
图2 光学阈值检测(a)阵列化结构样片与(b)检丈量随位移的改变
图3 自标定模块三维集成计划(a)剖面图与(b)三维图
图3是现在规划的自标定模块三维集成计划,能完结微振荡台、检测结构、被标定MEMS传感器之间的机械结构叠层与互联,体积小于1立方厘米。图4为已完结的加速度计与微振荡台的集成样品及测验状况,处理了机械灵敏结构集成应力问题, 有望到达小于100 x 10^6的自标定精度,彻底处理多种MEMS惯性传感器长时间安稳性问题。
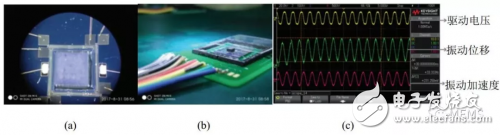
图4 加速度计与微振荡台集成(a)开始集成样片、 (b)封装样品与(c)测验成果
3 MEMS压电微马达技能
如图5所示,压电MEMS微履行器在薄型化、低电压方面的开展供给了新的马达开展思路,可以在极扁平化集成空间中圆片级集成微履行器(电机)、转子、状况检测结构,有望彻底处理传统超声马达固有的体积大、安装一致性差、无法与其他结构高密度集成等问题。
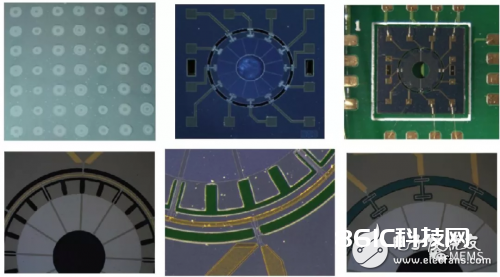
图5 微马达履行器显微结构
现在,世界上现有的研讨标明平面可集成微马达履行器尚存在驱动功率(Q值)低、负载驱动才能(位移或输出力矩)缺乏等问题。针对上述问题,选用新颖的规划思路,立异提出储能支撑结构规划、异形电极结构等新式规划。从图6所示微马达履行器样片的测验成果可以看出,规划办法切实有用,微马达履行器不光在位移/电压、Q值两项目标上世界抢先,并且线性度与安稳性优异,可以完结对负载的步进旋转驱动,在输出力矩、行波驱动功率、集成电压等方面潜力极大。详细参数比照见表2。
一起,提出集成化旋转步进检测计划,有望进一步处理极扁平化集成需求、高定位精度需求,完结检测结构与微马达微履行器、转子的共形集成,希望到达±0.2°的旋转检测精度。
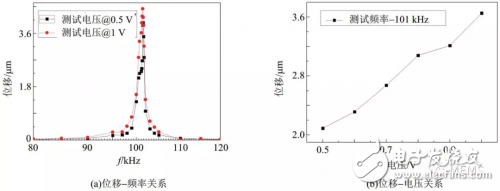
图6 微马达履行器
表2 微马达履行器功能参数及比照

4 PZT资料与微履行器长时间安稳性研讨
长时间安稳性是微履行器的重要运转目标,依据PZT资料的MEMS微履行器的长时间安稳在国内没有有相关文献报导。影响微履行器长时间安稳的最首要要素在于规划和PZT资料特性, 怎么有用的使用PZT资料特性,经过规划办法优化,进步微履行器长时间安稳性需要在多次序流片迭代过程中不断剖析总结。经过界面调控、组分掺杂、制备优化、极化办法优化等一系列合作资料功能参数的规划办法改善,取得了压电资料两个方面功能的优化:首先是温度安稳性进步,下降了对工艺温度的约束,完结了器材功能安稳度的进步;别的,经过调控铁电回线,取得了微履行器履行才能的进步。成果如图7所示。
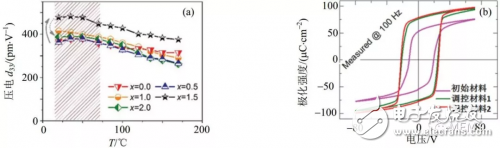
图7 (a)资料温度安稳性丈量与(b)铁电回线调控
现阶段微履行器疲惫测验成果如图8所示,可以取得振荡次数高于10^7的安稳作业状况。现在正在进行多资料体系界面机理研讨,探究影响履行器疲惫功能的要素,为进一步进步微履行长时间安稳性进步奠定根底。
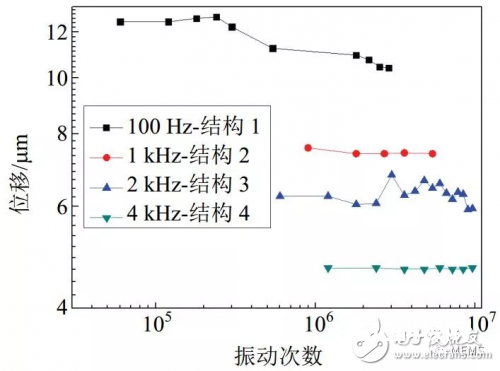
图8 微履行器疲惫测验成果
科学含义
本作业以压电MEMS微履行器规划为根底,以全集成MEMS工艺为手法,制备出功能优异的MEMS微履行器,扫除了MEMS微履行器或许带来的驱动能量耗散、功率缺乏、力矩不行等缺陷,填补了集成微体系的履行器处理计划空白。在国内打破了PZT资料与MEMS技能交融的规划与工艺瓶颈,开展出包含“MEMS微履行器规划与制备、集成化闭环检测操控、多结构集成”的压电MEMS履行器模块才能,首先推动压电MEMS器材规划、制备、测验标准化、批量化技能,为其运用奠定根底。
展望
在进一步进步MEMS微履行器功能的根底上,深入研讨集成化闭环检测操控技能、多结构集成技能,完结惯性传感器原位自标定模块与压电微马达模块。一方面,惯性传感器原位自标定模块将会带来MEMS惯性传感器范畴的革新,打破传统的自标定形式与高本钱传感器芯片优化形式,不仅是传统高精度高安稳性高本钱MEMS惯性传感器的替代品,并且开展出一系列新式运用和革新,包含供给惯导体系的新规划自由度、导航定位、运动载体操控等体系架构革新,可以下降惯性传感器甚至惯导体系的保护本钱,延伸保护周期。另一方面,压电微马达技能因为具有低电压低功耗、高集成度、高精度等长处,将广泛运用于微动作操控部件、微机械安装修理、纳米定位等方面。