摘要:前期研讨提出一种智能手机与ZigBee网络相结合的智能泊车体系整体架构,具有低本钱、交互性强等长处。为具体完成该架构中运用的 ZigBee网络,规划了一套泊车场车位数据收集体系。该体系依据ZigBee技能建立,由中心结点、路由器结点和终端结点组成。中心结点的微操控器选用低功耗的LPC11C14,GSM模块选用SIM300模块。三类结点的ZigBee通讯芯片选用CC2530。归纳多方面要素,选用依据地磁检测技能的 HMC5883L作为车位传感器,尺度小、装置便利、对非铁磁性物体无反响、牢靠性高是该传感器的长处。在硬件电路的基础上,规划了三类结点的数据收发和操控程序。经测验,所规划的车位数据收集体系完成了预期功用要求,且具有低本钱、低功耗的特色。
关键词:智能泊车体系;车位数据收集体系;ZigBee网络;HMC5883L传感器
智能泊车体系是城市智能交通体系中的重要组成部分。现在,国内外现有城市智能泊车体系一般由4部分构成:数据收集子体系、数据传输子体系、城市级办理操控中心、数据发布子体系。数据传输子体系与城市办理操控中心间,以及城市办理操控中心与数据发布子体系间,依托GSM、GPRS、CDMA、3G、4G等移动通讯办法进行通讯,需长时刻交纳通讯费用,形成体系运营本钱高。
为此,笔者地点的课题组提出一种无需建造城市级办理操控中心的体系架构。该架构经过在城市中的首要泊车场或路旁边泊车区域别离布置一个ZigBee网络,再与用户的智能手机相配合,即可完成城市规模内的智能泊车。用户与ZigBee网络中操控结点间的小额通讯费用,由用户进行承当,然后大大下降了城市智能泊车体系的运营费用。
本文论说各ZigBee网络中的中心结点、路由器结点、终端结点等的首要电路规划及首要软件模块规划。
1 泊车场级ZigBee网络的组成
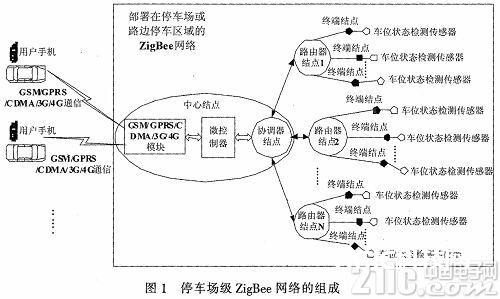
布置在各泊车场或路旁边泊车区域的ZigBee网络,其内部结构如图1中的方框部分所示。该网络由1个中心结点、若干个路由器结点、以及数量更多的终端结点等组成。中心结点内部又由微操控器、和谐器结点、GSM/GPRS/CDMA/3G/4G通讯模块(为简化起见,在后文中简称GSM模块)等组成。每个终端结点都衔接有1个车位状况检测传感器,用于实时收集各车位当时是否闲暇。当车位状况发生改变时,终端结点将经过邻近的路由器结点向和谐器结点进行上报。和谐器结点收到车位状况发生改变的音讯后,一方面将音讯传递给微操控器后存入E2PROM,另一方面经过路由器结点向终端结点发送反响。此外,中心结点的GSM模块随时预备接纳用户手机发送的泊车恳求,然后将恳求传递给微操控器,微操控器在E2PROM中查找是否有闲暇车位,最终将找到的闲暇车位或一切车位已满的信息经过GSM模块反响给用户手机。
2 ZigBee网络结点的首要电路规划
2.1 首要芯片选型
体系硬件由中心结点、路由器结点、终端结点等组成。中心结点又由微操控器、和谐器结点、GSM模块等组成。考虑到某些室外泊车场或路旁边泊车区域或许缺少供电条件,低功耗是硬件规划的首要准则。
微操控器选用恩智浦公司的LPC11C14芯片。该芯片依据Cortex—M0内核,特别合适于集成度较高和超低功耗要求的使用。和谐器结点、路由器结点、终端结点的ZigBee芯片选用TI公司的CC2530芯片。因为从休眠形式转化到作业形式的耗时特别短,所以该芯片十分合适低功耗使用。GSM模块选用了市场上比较老练的依据SIM300芯片的模块。
现在常用的泊车位检测办法有感应线圈技能、视频检测技能、超声波感应技能、红外勘探技能、地磁检测技能等。其间,感应线圈技能的检测精度较高,牢靠性较好,但装置保护比较复杂,会对路面形成必定损坏;视频检测技能直观牢靠,但数据量很大,检测的实时性较差,特别是会遭到光线缺乏、尘埃、气候条件差等的影响;超声波感应技能一般需求在车位的上方装置传感器,一般仅适用于部分室内泊车场,且本钱较高;红外勘探技能相对老练,但比较简单会遭到热源、光源等的搅扰而引起误判;地磁检测技能是依据磁阻传感器的车位检测技能,具有尺度小、便于装置、对非铁磁性物体无反响、牢靠性高级特色,现在遭到国内外的广泛注重。综上剖析,车位状况检测传感器选用霍尼韦尔公司的HMC5883L地磁传感器。
因为LPC11C14芯片内部不含E2PROM,为完成车位状况数据在掉电条件下仍然能够存储,经过I2C接口外接AT24C02芯片。LPC11C14 与CC2530间的数据通讯规划为使用串口进行通讯。因为LPC11C14只含有一个串口资源,为完成LPC11C14与GSM模块的串行通讯,选用 SPI转串口芯片MAX3100进行转化。
LPC11C14板的电源芯片选用MIC5209。M%&&&&&%5209是一款5 V变3.3 V的稳压电源芯片,5 V电源供应GSM模块,3.3 V供应LPC11C14芯片、SPI转串口电路等。CC2530板的电源芯片选用HT7533,该芯片具有极低的静态电流及高电压输入的特性。
2.2 首要电路图
图2为微操控器与GSM模块之间的SPI转UART电路,SPI线与微操控器相连,UART线与GSM模块相连。选用的SPI转UART 芯片为美信公司的MAX3100芯片。MAX3100供电电源为3.3 V,外接晶振可挑选3.686 4 MHz和1.843 2 MHz两种。SPI接口线首要为MOSI、MISO、SCLK、CS,其间MOSI为主机发送从机接纳,MISO为主机接纳从机发送,SCLK为时钟信号,CS为片选线。串口线为TX、RX,别离为发送与接纳。IRQ需求接上拉电阻坚持高电平,原因是在软件规划时,挑选低电平触发外部中止。
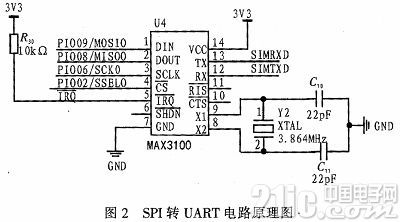
图3为E2PROM芯片AT24C02的衔接电路。图中,SCL和SDA别离为I2C总线的串行时钟管脚、串行数据/地址管脚,A0、A1、A2为从机地址引脚,WP为写保护管脚。因I2C通讯中要求SCL和SDA管脚有必要处于上拉状况,所以接有R10和R11两个上拉电阻。因为I2C总线上只挂接了一片 AT24C02,因而将A0、A1、A2管脚接地。将WP管脚接地,然后答应对AT24C02器材的正常读写。A124C02的芯片地址操控格局为8位,前七位为1010A2A1A0,第八位R/W为数据传输方向操控位。R/W位用于操控芯片是读仍是写。当该位为0时,对芯片进行写操作;当该位为1时,对芯片进行读操作。所以当对芯片进行写操作时,芯片地址为A0H;当对芯片进行读操作时,芯片地址为A1H。芯片内的寻址规模为从00到FF,可对一切 256个字节进行操作。
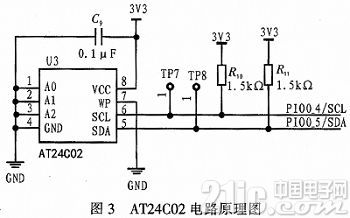
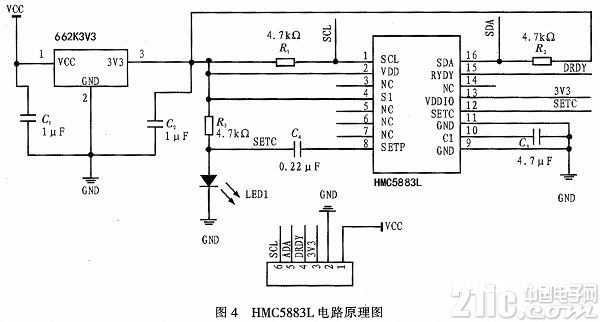
图4为依据HMC5883L的车位传感器原理图。C1和C2衔接着电源稳压芯片,按捺电压动摇,坚持电路中的电压安稳。因为I2C通讯中要求SCL和 SDA管脚有必要处于上拉状况,所以接有R1和R2两个上拉电阻。LED1为电源作业指示灯。C3和C4两个外部电容应为具有低ESR特性的陶瓷%&&&&&%。
3 ZigBee网络结点的首要软件模块规划
3.1 和谐器接纳ZigBee网络数据
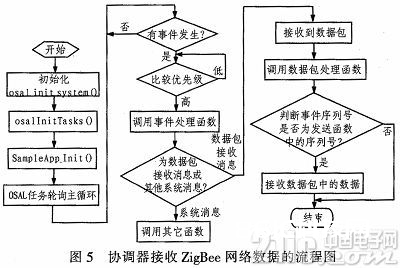
图5为和谐器接纳ZigBee网络数据的程序流程图。在接纳程序中,首要要对体系和使命办理函数进行初始化,其次对主函数 SampleApp()函数进行初始化。接着进入体系的事情轮询循环中,当有事情同时发生时,要比较其优先级,先处理优先级高的事情,事情的优先级在初始化中设定。随后调用事情处理函数,事情处理函数判别体系音讯,假如为接纳数据包的音讯,则调用数据包处理函数Sample App_MessageMSGCB(),最终判别事情的序列号,是否为初始化里注册的序列号,假如是本来注册的序列号,则接纳该数据包中的数据。因为各终端结点都将所收集的数据传输给和谐器,因而选用点播传输办法,各结点发送数据时的意图地址均为0X0000。
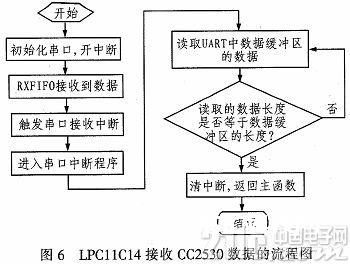
3.2 LPC11C14接纳CC2530数据
终端结点经过传感器守时收集车位状况,当车位状况改变时,经路由器结点转发给中心结点的和谐器模块CC2530。之后,CC2530将接纳到的数据经过串口发送给微操控器LPC11C14。最终,LPC11C14将接纳到的数据存储到外接的E2PROM芯片AT24C02中。整个传输进程中,LPC11C14为中止触发办法。图6以LPC11C14经过串口接纳CC2530数据为例,给出了对应的流程图,LPC11C14经过串口向 CC2530发送数据的进程相似。LPC11C14读取CC2530收集到的数据后,经过I2C总线写到外接的AT24C02芯片中。
3.3 LPC11C14收发GSM模块数据
当LPC11C14需求向用户发送数据时,先经过MAX3100的发送缓冲区TXFIFO发送给GSM模块,然后GSM模块再将数据发送给智能手机。
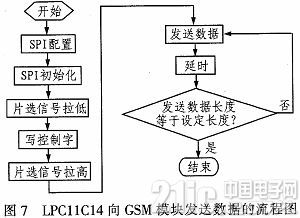
当GSM模块接纳到智能手机发送的数据时,会把数据发送到MAX3100的接纳缓冲区RXFIFO,然后再把数据传输给LPC11C14。因为 MAX3100与LPC11C14为SPI衔接,而GSM模块与MAX3100的衔接为串口衔接,可是SPI的传输速度是串口传输速度的几倍,因而需求在 SPI传输前加上必守时刻的延时。图7以LPC11C14向GSM模块发送数据为例,给出了对应的流程图,LPC11C14从GSM模块接纳数据的进程相似。
4 体系测验
4.1 HMC5883L收集磁场数据测验
在某小型泊车场的泊车位进步行了测验。依据该泊车场的地舆朝向,收集数据时将传感器X轴正方向朝正北,Y轴正方向朝正西。表1为车位上没有车时所收集的数据。表2为将终端结点放置于车辆下面时所收集的数据。表中的数字增益为440,即用表中的数字除以440可得到当时各个轴向以高斯为单位的磁场强度。
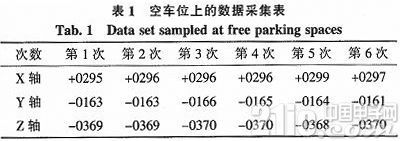
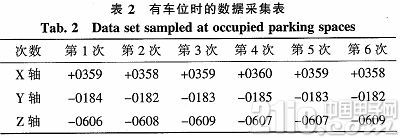
从表中数据能够看出,泊车位有车和无车时,X轴和Y轴的读数改变不是特别显着,可是Z轴上的读数有明显的改变,只需求依据Z轴的数据即可判别泊车位上是否有车辆。
4.2 ZigBee数据传输与存储测验
图8为从开发工具IAR中观察到的,LPC11C14所接纳到的传感器数据。从该图右侧可看到,当时所接纳到的磁场数据为“x:+0147 y:+0250 z:-0247”
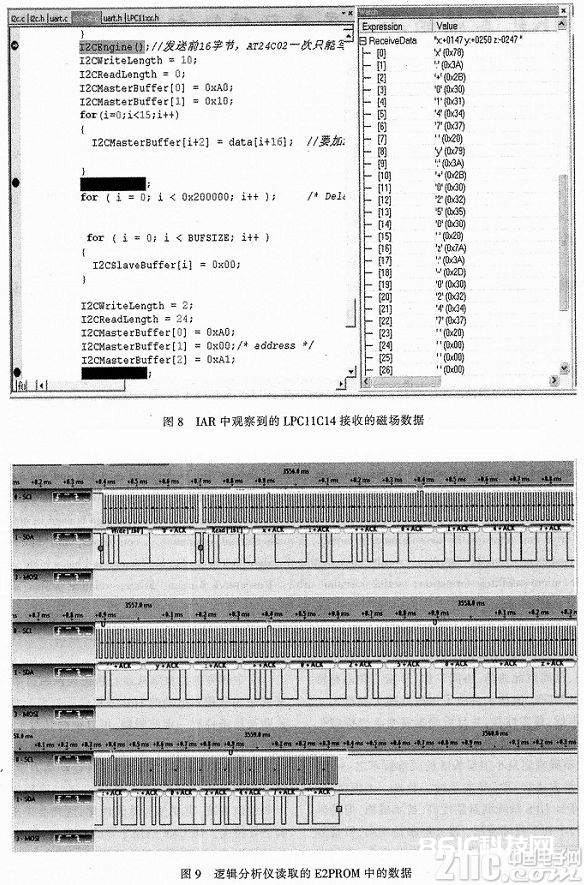
为验证LPC11C14所接纳的数据的确被精确地写到了E2PROM,用逻辑剖析仪的探针接在SCL、SDA和MOSI引脚进行了丈量,图9为丈量成果的时序图。可将该图按时刻次序分红上、中、下三部分。每一部分都显现了SCL、SDA和MOSI 3个引脚在不同时刻段的时序图。从各部分SDA管脚时序图上方的标示可看出,除必要的ACK应对信号以外,“x:+0147 y:+0250 z:-0247”的磁场强度信息的确被写到了AT24C02中且被精确读出。
5 定论
在课题组前期研讨成果中,提出一种无需建造城市级办理操控中心的体系架构,然后有望大大下降城市级智能泊车体系的建造及运营本钱。
针对该架构中泊车场内车位状况的数据收集问题,本文规划了一种依据ZigBee的泊车场车位数据收集体系,给出了具体的规划方案、首要电路图、首要软件模块的流程图,从硬件和软件两方面介绍了体系的规划思路和完成办法。本规划选用HMC5883L地磁传感器的磁场数据用于车位检测,具有尺度小、装置便利、牢靠性高级长处。选用ZigBee技能组成无线网络用于传输各车位状况数据,不发生移动通讯费用,运营本钱低。