1 导言
现在,我国城市公共交通首要依靠公交车,站间间隔一般在500~1000米。公交车在每站间有数次刹车和发动,在交通流量的高峰期,刹车和发动愈加频频,带来动力糟蹋、尾气污染加重、部件寿数缩短等一系列问题。
本课题研讨的操控体系,可使并联液压混合动力车充分利用制动能量,在频频刹车和发动的路况,能够明显提高车辆发动、加快和减速特性,改进车辆排放,下降油耗,延伸发动机及刹车设备的寿数。并且与混合动力电动车比较,该体系在本钱,技能老练度,可靠性,保护性等方面均占有适当的优势。
并联式液压混合动力车的动力传动系中有两种或两种以上的动力源可一起或独自供给动力,有两个或两个以上相应的履行元件可一起驱动负载,该动力传动系首要由发动机、变速箱、主减速器、液压蓄能器和液压泵/马达组成。并联方式保存传统车的动力传动链,只是在原传动链上增加了由液压泵/马达和液压蓄能器组成的能量再生体系,然后构成双动力驱动。
现在,并联液压混合动力车技能现已比较老练,如图1所示。
车辆在发动和加快时,液压驱动体系供给辅佐动力,开释蓄能器中贮存的能量;车辆减速和制动时,液压驱动体系供给辅佐制动力,并向蓄能器中贮存能量。
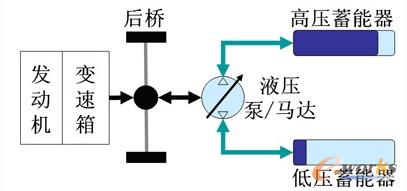

图1 并联液压混合动力车结构原理图
2 操控体系网络结构
CAN总线是一种有用支撑散布式操控或实时操控的串行通讯网络,优越性是清楚明了的,一起,CAN总线也被认为是混合动力车最佳通讯结构,本文选用CAN总线网络来建立操控体系。
图如下图2所示,操控体系选用散布式操控,共有5个节点操控器,首要散布在车上操控量和收集量密布的当地,包含主操控模块、液压体系测控模块、液压充液操控模块、车辆信息收集模块以及发动机操控模块。
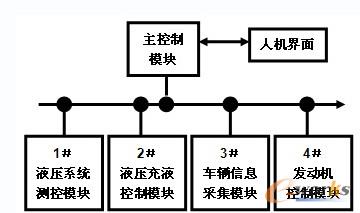
图2 操控体系网络结构
主操控模块操控器选用装备了智能PC104 CAN操控卡的PC104计算机,其他模块操控器选用以P80C592单片机为中心构成。P80C592芯片自身集成有CAN操控器,A/D转换器,看门狗,运用该芯片使各操控节点小型化成为可能,在它的基础上扩展了外围模拟量和数字量的输入和输出,便于进程操控。