据报道,激光雷达(LiDAR)与其它传感器 技能(摄像头、雷达和超声波)的相互竞赛添加了对传感器交融的需求,一起也要求对光电勘探器、光源和MEMS微镜的细心甄选。
技能(摄像头、雷达和超声波)的相互竞赛添加了对传感器交融的需求,一起也要求对光电勘探器、光源和MEMS微镜的细心甄选。
跟着传感器技能、成像技能、雷达、LiDAR、电子设备和人工智能技能的前进,数十种先进驾驭辅佐体系(ADAS)功用已得以完结,包含防撞、盲点监测、车道违背报警和泊车辅佐。经过传感器交融同步此类体系的运转,以答应全自动驾驭车辆或无人驾驭车辆对周围环境检测,并正告驾驭员潜在的路途危险,乃至能够采纳独立于驾驭员的躲避动作来避免磕碰。
自动驾驭轿车还有必要能在高速情况下区别并辨认前方物体。运用间隔判别技能,这些自动驾驭轿车有必要快速构建出约100米远路途的3D地图,并能在250米远的间隔上创立出高角分辨率的图画。假如驾驭员不在场,轿车人工智能有必要做出最优决议计划。
此使命的几种底子办法之一是,丈量能量脉冲从自动驾驭轿车宣布到方针再回来车辆的往复飞翔时刻(ToF)。当知道脉冲经过空气的速度时,就能够核算出反射点的间隔。这个脉冲能够是超声波(声纳),也能够是无线电波(雷达)或光(LiDAR)。
这三种ToF技能,想具有更高的角分辨率图画,LiDAR是最好的挑选,这是因为LiDAR图画的衍射(光束散度)更小,对附近物体辨认才能比雷达更优异(见图1)。关于高速情况下需求满足时刻来应对如迎头相撞等潜在危险,更高的角分辨率尤为重要。
激光源的挑选
在ToF LiDAR中,激光宣布持续时刻为τ的光脉冲,在发射的瞬间激活计时电路内部时钟(见图2)。从方针反射的光脉冲抵达光电勘探器时,会发生一种使时钟失效的输出电信号。这种电子丈量往复ToF Δt 可核算出方针到反射点的间隔R。
若实际中激光和光电勘探器坐落同一方位,其间隔R是由以下两要素影响:
c为光在真空中的速度,n为传达介质的折射率(空气中折射率挨近1)。这两个要素影响着间隔分辨率ΔR:若激光点的直径大于要解析的方针巨细,则丈量Δt和脉冲的空间宽度w(w = cτ)的不确认性为δΔt。
榜首个因子标明为ΔR = ? cδΔt,而第二个因子则标明为ΔR = ? w = ? cτ。若间隔丈量的分辨率为5 cm,以上联系标明:δΔt约为300 ps,τ约为300 ps。ToF LiDAR要求运用小时刻颤动的光电勘探器和电子勘探器(首要对δΔt有贡献)和能发射短时脉冲的激光(如相对贵重的皮秒激光)。在典型轿车LiDAR体系中,激光发生的脉冲持续时刻约为4 ns,因而最小光束发散角是必需的。
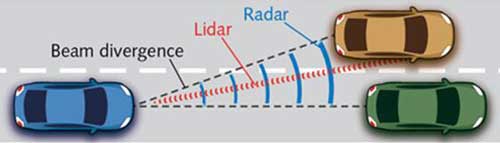
图1 光束发散角取决于发射天线(雷达)或透镜(LiDAR)的孔径和波长的比值。此份额关于雷达发生的较大光束发散角和较小角分辨率来说是偏大的。如图,雷达(黑色)无法区别这两辆车,而LiDAR(赤色)则能够
对轿车LiDAR体系规划者来说,最要害的便是挑选光的波长。但有以下几项要素约束了此挑选:人眼安全性、与大气的相互作用、可选用的激光器以及可选用的光电勘探器。
最受欢迎的两种波长是905 nm和1550 nm,905 nm光波的首要长处是硅能吸收此波长的光子,而硅基光电勘探器一般比勘探1550 nm光波的砷化镓铟(InGaAs)红外(IR)光电勘探器廉价。可是,1550 nm对人眼的安全性更高,答应激光运用的每个脉冲辐射能量更大——这是光子预算中的重要要素。
大气衰减(在所有的气候条件下),从空气中粒子的散射,以及方针物理外表的反射,都是依赖于波长的。但关于轿车LiDAR来说,因为气候条件和反射外表类型可能性很多,这是一个杂乱的问题。在实际的环境中,因为1550 nm的吸水率比905 nm的更强,其实905 nm的光丢失更少。
光电勘探器的挑选
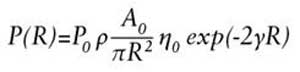
发射的脉冲中只要小部分光子抵达了光电勘探器的有源区域。若大气衰减不会跟着脉冲途径发生改变,则激光的光束发散角可忽略不计,照明点小于方针,入射视点为零,反射为彻底漫反射(Lambertian),那么脉冲光接纳的峰值功率P(R)为:
光电勘探器的挑选
其间,P0为发射激光脉冲的光峰值功率, ρ 为方针反射率,A0为接纳器的孔径面积,η0为勘探光的光谱透射,γ为大气衰减系数。
上述方程标明,跟着间隔 R的添加,接纳功率敏捷下降。作为参数及R=100 m的合理挑选,光电勘探器有源区域上回来的光子数近超越典型值(发射1020次),为其几百到几千倍的数量级。而这些光子会与未带着有用信息的环境光子竞赛。
运用窄带滤波器可削减抵达勘探器的环境光子数量,但却不能彻底消除。环境可下降检测的动态规模和添加噪声(环境光子散粒噪声)。值得注意的是,在典型的条件下,地上太阳辐射照度在905 nm到1550 nm区间。
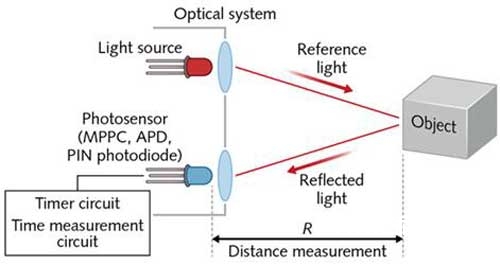
图2 飞翔时刻(ToF)LiDAR底子设置的详解
在轿车周围的创立360° x 20°的3D地图,需求光栅扫描单个/多个激光光束,或对场景进行光掩盖并搜集点云数据。前一种办法被称为扫描式LiDAR,而后者是Flash面阵式LiDAR。
有几种办法能够完结扫描式LiDAR。榜首种办法,以Velodyne(San Jose,CA)公司为例,装置在车顶的激光雷达渠道以每分钟300~900转的速度旋转,一起从64颗905 nm激光二极管宣布脉冲。每个光束都有一颗专用雪崩光电二极管(APD)检测器。相似的办法是运用旋转多面镜,在不同方位和下倾视点,以稍微不同的歪斜视点来操控单束脉冲。在恶劣且杂乱的驾驭环境中,这两个规划中的运动部件都暗藏着失利的危险。
第二种办法,使扫描式LiDAR变得更紧凑的办法是运用MEMS微镜,在2D方向上以电操控光束。虽然技能上仍存在一些运动部件(微镜也有振动),但振动起伏很小,且频率满足高,还可避免MEMS微镜与轿车之间的机械共振。可是,MEMS微镜的几许尺度约束了其振动起伏,因而选用MEMS微镜的LiDAR视界有限,这是MEMS办法的缺陷。虽然如此,因为此种办法成本低、技能老练,仍是赚足了眼球。
光学相控阵(OPA)技能,为第三种竞赛扫描式LiDAR技能的办法,因其牢靠的“无运动部件”规划而深受欢迎。它由光天线元件阵列组成,这些元件相同被相干光照亮。经过独立操控每个元件从头发射光的相位和振幅来完结光波转向,远场搅扰发生一种抱负的照明形式,从单光束到多光束。不幸的是,各式各样小元件的光损耗约束了其可用规模。
Flash面阵式LiDAR对场景进行光掩盖,虽然照明区域与勘探器视界相匹配。在勘探光学焦平面上的APD阵列即为勘探器。每个APD均独登时丈量ToF以完结该APD对方针特性成像。这是一种真实的“无运动部件”办法,其间切向分辨率被2D勘探器的像素巨细所约束。
可是,Flash面阵式LiDAR的首要缺陷是光子预算:一旦间隔超越几十米,回来光子的数量就太少,底子无法进行牢靠的勘探。假如不是对场景进行光掩盖,以献身切向分辨率为价值,用网格点状结构光来照明,这就可得到改进。笔直腔面发射激光器(VCSELs)使其可在不同方向一起发射不计其数的光束。
怎么不受ToF约束
因为勘探电子回来脉冲和带宽较宽的缺点,ToF LiDAR易受噪声影响,而阈值触发可引起丈量误差Δt。根据这些原因,调频接连波(FMCW)LiDAR是一种风趣的挑选。
在FMCW LiDAR(或chirped 雷达)中,天线接连发射的无线电波频率是调制的,例如其频率跟着时刻T从f0到 fmax线性添加,然后再跟着时刻T从 fmax到f0线性削减。假如反射波从某处的移动物体回到发射点,其瞬时频率将与发射瞬间的频率不同。差异来自有两个方面:一是与物体间的间隔,二是其相对径向速度。因而可经过电子丈量频率差异,并核算物体的间隔和速度(见图3)来确认。

图3 在chirped 雷达中,经过电子丈量 fB1 和fB2 ,能够确认反射物体的间隔和它的径向速度
遭到chirped 雷达的启示,FMCW LiDAR可用不同的方法挨近被测物体。在最简略的规划中,能够对照亮方针的光束强度进行“啁啾chirp”(宽带线性调频)调制。该频率与FMCW雷达的载波频率恪守相同的规则(如多普勒效应)。反射回来的光被光电勘探器检测到,然后康复其调制频率。输出被扩大,并与本机振动器混合,以答应丈量频率的改变,一起由此核算出方针的间隔和速度。
可是FMCW LiDAR也有其局限性。与ToF LiDAR比较,它需求更强壮的核算才能。因而,FMCW LiDAR在生成完好3D环境视图时,速度要慢一些。此外,丈量的精度对啁啾斜线的线性度十分灵敏。
虽然规划一套功用完善的LiDAR体系是十分有应战性的,但这些应战均是可战胜的。跟着研讨的深化,咱们正越来越挨近“大部分轿车完结安装后就能够完结彻底自动驾驭”的年代。