1.导言
跟着永磁同步电机在工业、农业、航天等各范畴的广泛应用,永磁同步电机在电动汽车驱动体系范畴也得到同步开展。众所周知,永磁同步电机的安稳牢靠运转,需求装置方位传感器来检测方位信号。因旋转变压器(简称旋变)通过与相应的解码芯片合作即可对电机转子方位进行检测,所以旋变作为较为牢靠的肯定方位传感器被广泛选用。现在许多专家学者开端研讨旋变方位解码体系[1-4],跟着旋变及其解码芯片技能的不断开展,旋变的牢靠性更高,解码电路也愈加紧凑。本文选用当时最新一代可变磁阻旋变和与之合作的解码芯片AD2S1205,规划了相应的旋变方位解码体系,并通过测验体系验证了体系的牢靠性。
2.旋变作业原理
旋变的一般装备是初级绕组坐落转子上,两个二次绕组坐落定子上。本体系选用的可变磁阻旋变的转子上则不存在绕组,如图1所示,初级绕组和二次绕组均坐落定子上,转子的这种特别规划可使得次级耦合跟着角方位改变而发生正弦改变。
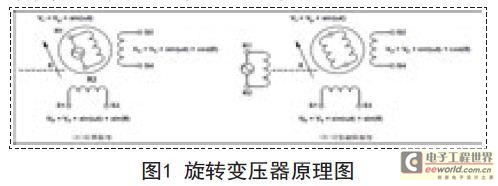
不管何种装备,旋变正弦绕组的输出电压是S1-S3,余弦绕组的输出电压是S2-S4,如(1)式和(2)式所示。其间:θ为轴角,ω为转子鼓励角频率,E0为转子鼓励起伏。

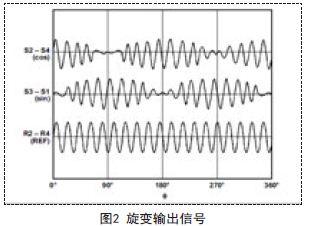
可变磁阻旋变初级绕组选用沟通基准源鼓励,两个次级绕组机械上穿插90°。定子二次绕组上耦合出的电压起伏是转子相对于定子角方位θ的函数,旋变输出信号如图2所示。
转化器盯梢轴角θ的原理为,转化器发生输出角φ,然后反应φ以与输入角θ相比较。当转化器正确盯梢输入视点时,二者之间的差错将被驱动至0。为了测量差错,将(1)式乘以cosφ,(2)式乘以sinφ,其差值为:

当视点差错(θ-φ)的值很小时,(4)式即近似等于0E(θ-φ)。AD2S1205具有一个由相位灵敏解调器、积分器和补偿滤波器构成的闭环体系,可力求使差错信号归零。当该方针实现时,在转化器的额外精度规模内,输出角φ即等于旋变视点θ。
3.硬件电路规划
硬件电路的规划是环绕AD公司的解码芯片AD2S1205打开的。首要,该芯片是一款完好的12位分辨率盯梢分解器数字转化器,内置可编程正弦波振荡器,为旋变供给正弦波鼓励,作业频率规模为8.192MHz±25%。该芯片选用Type II盯梢环路,可用于盯梢输入信号,并将正弦和余弦输入端的信息转化为视点和速率所对应的数字量,其最大盯梢速率是外部时钟频率的函数。Type II盯梢环路可以接连输出方位数据,且没有转化推迟,它还能供给噪声按捺,以及参阅和输入信号的谐波失真容限。
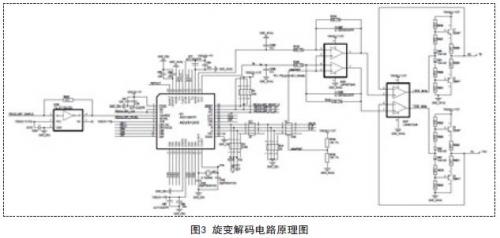
图3为旋变解码电路原理图。首要由AD2S1205解码芯片发生差分正弦励磁信号,通过运放扩大、跟随后,通过推挽的方法输出到电机旋变。电机旋变回来的差分信号S1-S3、S2-S4,经%&&&&&%26运算后送AD2S1205进行处理。SINLO和COSLO一起接入到REFOUT的意图是增强信号的安稳性,信号扩大倍数为1.5。
针对毛病检测,芯片内部有相关的毛病检测功用,其相关毛病的优先等级和毛病码如表1所示。

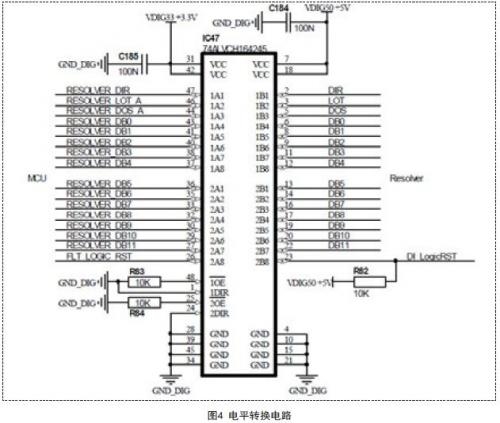
电平转化芯片选用74ALVCH164245,此芯片把旋变信号转为3.3V后送单片机,其电路如图4所示。
4.软件规划
4.1 复位时序
图5为AD2S1205复位驱动时序。
当AD2S1205的电源电压小于4.5V时,AD2S1205处于低电压复位状况,LOT/DOS一起为低电平指示,体系复位无信号。当电源电压超越4.5V今后,RESET管脚需坚持有用电平至少10μs以上,使得AD2S1205芯片复位。在复位无效后,AD2S1205需求至少20ms时刻,使得内部电路可以安稳作业,而且追寻电路可以安稳追寻输入视点。通过20ms的安稳作业时刻后,SAMPLE有用而且坚持一段时刻,复位软件流程如图6所示。