煤矿事端的应急救援根据事端灾祸的类型、事端或许引起的损坏程度和事端地址的实践环境采纳相应救援计划和救援配备,抵达真实的应急救援作用。现在,现已研发成功的救援机器人首要有多履带式机器人、腿轮式机器人、蛇形机器人和蛛行机器人等,在灾祸救援中起到了重要作用。可是,在井下灾祸现场,地上越障机器人的经过难度较大,有必定的局限性,不能彻底满意救灾的需求。为进一步完善应急救援体系,开发有用的技能和配备,本文提出了一种根据四旋翼飞翔器的煤矿井下应急救援解决计划。在本计划中以四旋翼飞翔器作为载体,动态的树立无线网络通讯信道,将事端地址的环境情况如瓦斯浓度、一氧化碳浓度、温度等参数和灾祸地址的视频画面实时的经过无线信道传送至救援指挥中心,供给较好的救援根据。
1 救援体系的组成
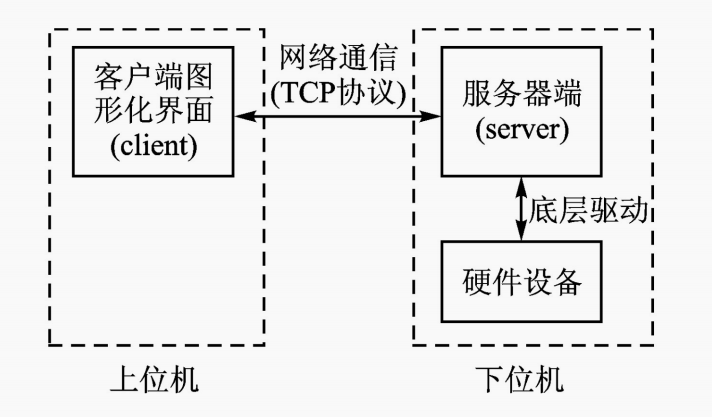
四旋翼飞翔器的煤矿井下应急救援体系由调度指挥中心、四旋翼飞翔器、无线传输链路节点、布放设备和数据收集终端组成。体系的框图如图1所示。指挥调度中心首要担任对灾祸现场实践环境参数和现场视频的接纳、进程操控、拟定救援使命的详细计划和救援辅导。
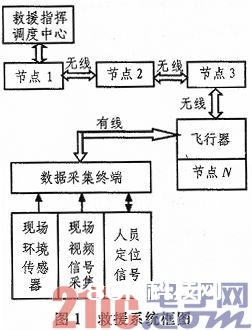
四旋翼飞翔器首要完结无线传输链路节点的运送和投进、现场视频收集、灾祸现场环境参数收集和人员定位信息的动态查找,一起将收集到的数据信息发送给无线传输链路
节点,无线传输链路节点以接连传递办法将数据传送至指挥调度中心。
无线传输链路节点完结数据的上发和下发使命以及人员辨认卡的查找功用。指挥调度中心将操控指令发送给链路节点,链路节点以接力传递的办法发送到远处的节点,操控四旋翼飞翔器的飞翔,一起将灾祸现场的参数以接力的办法传送回指挥调度中心。
布放设备担任将飞翔器带着的通讯节点投进到适宜的通讯地址。
数据收集终端以四旋翼飞翔器作为载体,完结现场环境参数如瓦斯、一氧化碳、二氧化碳、氧气和温度等参数的收集,现场视频画面的收集和人员定位信息的动态查找。
2 指挥调度中心
指挥调度中心担任对灾祸现场实践环境参数和现场视频的接纳、进程操控、拟定救援使命的详细计划和救援辅导。进程操控包含对飞翔器飞翔姿势的操控。飞翔器的操控由遥控器完结,本规划中的遥控器的规划选用Zigbee技能,Zigbee模块具有价格低廉、传间隔远、抗干扰性强、功耗低、稳定性强和操作简略等长处。
3 四旋翼飞翔器的操控与使用
四旋翼飞翔器是一种电动的、可以笔直起降的、多旋翼式遥控自主飞翔器。与惯例的旋翼式飞翔器比较较,结构紧凑简略,不需求专门的反扭矩桨板,升力大。四旋翼飞翔器可以笔直起降自在悬停,所以可习惯各种速度及各种飞翔剖面航路的飞翔情况,而且起飞着陆场地上积要求小。飞翔器飞翔高度为几米到几百米,飞翔速度为每秒几米到几十米,能钻到建筑物或窟窿地道内履行侦查使命。此外四旋翼飞翔器还具有体积小、分量轻、本钱较低、拆开便利、易于保护、飞翔高度低、具有很强的机动性等,特别适宜使用于煤矿应急救援使命中。
跟着新型材料、微机电(MEMS)、微惯导(MIMU)、微处理(MCU)器技能、聚合物高密度电池技能以及飞翔操控等技能的前进,微小型四旋翼飞翔器得到了迅速发展,对宽广科研
人员具有很强的吸引力,成为国际上新的研讨热门。现在,世界上对四旋翼飞翔器的操控研讨首要集中于3个方向:根据惯性制导的自主飞翔操控、根据视觉的自主飞翔操控和自主飞翔操控体系计划。
本文中选用根据视觉的自主飞翔操控办法,将装载在飞翔器上摄像头收集视频画面,实时传送给指挥调度中心,指挥调度中心根据实践的视频画面操控飞翔器在煤矿井下的飞翔轨道,一起飞翔器在上下和前左右装有间隔勘探模块,完结自主壁障功用,自主壁障功用优先级优于指挥调度中心发来的指令,确保飞翔器的肯定安全。飞翔器飞翔姿势由三轴加速度传感器进行收集,实时反映4个旋翼的转速和整机机身的姿势,完结对4个直流电机的闭环操控。
四旋翼飞翔器的规划的要害内容为飞翔器飞翔姿势的操控办法。四旋翼飞翔器具有空间六自在度,而只能经过调理4个旋翼的转速来完结飞翔操控,明显它是一个欠驱动体系(操控输入向量构成的空间维数小于位形空间维数的体系)。如图2~图4所示,经过操控4个电机的转速,即可以别离完结飞翔器6个自在度的操控。
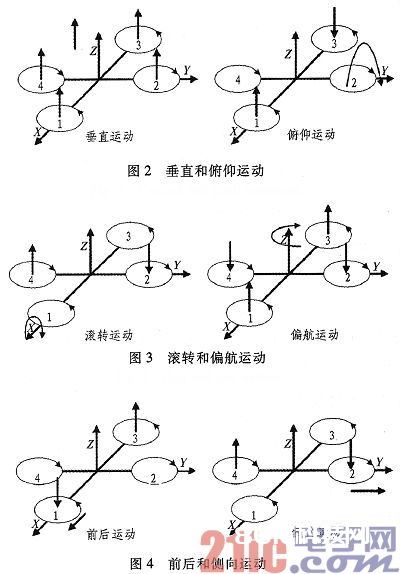
现在关于各种欠驱动体系模型的操控办法的研讨有许多,其间研讨成果最为丰盛的几种操控办法有:反步法(Backstepping)、线性最小二次型操控(LQR)、滑模操控(Sliding Mode)、神经网络自习惯、反应线性化以及H∞操控等。其间使用最多的是反步法。反步法首要根据Lyapunov理论,Lyapunov办法适用于任何办法的状况空间模型,单变量、多变量、线性、非线性、时不变、时变、接连、离散等。
4 无线传输链路节点
无线传输链路节点以无线接力办法传送数据,完结数据的上发和下发使命以及人员辨认卡的查找功用,是构建井下无线网络通讯信道的要害点。无线传输链路节点由电池、主控部分和无线部分组成,组成框图如图5所示。
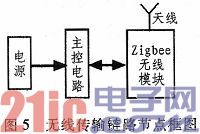
电池选用小体、积高密度的聚合物电池,主控部分完结对接纳数据处理和转发以及对人员辨认卡的查找。主控部分选用根据Codex—M3内核的低本钱、体积小、高性能和低功耗的32为微处理器芯片,如飞利浦系列芯片和ST公司的STM32系列芯片,其间LPC系列部分芯片处理速度可达100MHz到120 MHz,彻底可以满意大数量的高速处理。无线部分选用一款以CC2530F256为主控芯片的中心板的zigbee无线模块,具有高性能、功耗低的长处并具有以下特色:
1)通讯间隔超越350m;牢靠通讯间隔超越250 m;可主动重连通讯间隔超越120 m(作业环境:空阔区域)
2)作业频段:2.4 GHz
3)作业电压:2.0~3.6 V
4)温度规模:-40~85℃
5)串口波特率:38400 bps(默许),可设为其他波特率
6)体积:26 mm x 27 mm(PCB)
7)节点:可装备为Coordinator、Router、%&&&&&%ndDevice。
5 布放设备
布放设备上装载有若干个无线传输链路节点,固定在四旋翼飞翔器上。指挥调度中心遥控的操控指令经过无线接力树立的数据传输网络发送给布放设备,操控布放设备在适宜的方位布放通讯节点。
6 数据收集终端
数据收集终端经过固定于四旋翼飞翔器之上,由人员定位辨认卡读卡器、图画收集模块和各种环境参数传感器如瓦斯、一氧化碳、二氧化碳、氧气和温度等组成。数据收集终端可以实时的收集飞翔器侦测方位的实践环境参数,可以抵达救援人员无法抵达的风险现场和地址。数据收集终端将收集到的数据经过无线的办法发送给最近的通讯节点,再以接力办法发送给救援指挥调度中心。数据收集终端一切数据收集传感器设备均选用简化功用类型的设备以降低功耗和减轻四旋翼飞翔器的载重分量。
在数据收集终端的设备中,图画收集模块传送的数据量最大,占用信道资源也最大,形成无线发送的耗费也越大,为此,可以选用明晰度较低的摄像头,经过图画增强算法如空间域(如中值滤波、图画滑润和图画锐化等)或频率域(如频率域低通滤波和高通滤波等)图画增强算法将图画处理较为明晰。
7 快速树立信道的办法
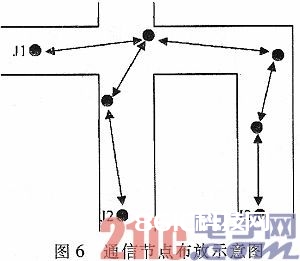
无线传输链路节点在恰当方位的投进由救援指挥调度中心进行操控,飞翔器在向前飞翔的进程中,不断地发送飞翔器与上一无线传输链路节点通讯信号的强度,当通讯的信号强度(RSSI),抵达设定极限值时,指挥调度中心宣布投进通讯节点的指令给飞翔器上的投进终端,此刻飞翔器悬停并投进通讯节点。因为煤矿井下交通环境杂乱,需求根据摄像头实时传回的画面投进通讯节点。如巷道穿插处或巷道转弯处,以确保穿插和转弯处信号的传输质量。如图6所示,由J1到J2和J3经过放置无线节点完结信息无线接力传递。根据通讯节点的投进次序,为每个节点顺次以递加的办法编号,飞翔器向指挥调度中心发送数据时,按大编号节点向小编号节点发送数据;向飞翔器发送指令时,小编号节点向大编号节点发送数据。
8 定论
研发煤矿井下救援的设备具有重要的现实意义和紧迫性,四旋翼飞翔器应急救援体系可以满意灾祸现场杂乱的环境,先于救援人员快速的抵达灾祸地址,供给有用的救援信息,为井下救援供给根据。与地上越障式救援机器人比较,四旋翼飞翔器具有更为宽广的使用空间和远景。