步进电机模块:

原理图:
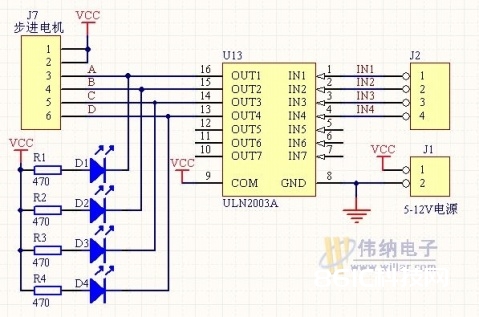
两相六线步进电机,步进角7.5度,额外作业电压12V,完全能够运用5V做试验。
| 以下是引证 gguoqing 在2006-6-11 15:10:02的讲话:
运用伟纳定做的20CM杜邦头试验连接线,能够很便利的将ME300与步进电机模块连接起来。 http://www.willar.com/shop_view.asp?id=47 在ME300B上运用时,可从J7上引出5V电源到步进电机模块J1上。 将J1(%&&&&&%E)上的P1.0-P1.3用杜邦头试验连接线连接到步进电机模块J2上。 |
产品概况:
http://www.willar.com/shop_view.asp?id=48。
以下是本站管理员gguoqing专门编写的演示程序。
C言语典范:
/*******************************************************************
/*
/* ME300系列单片机开发体系演示程序-步进电机键控正回转试验
/*
/* 邮箱: gguoqing@willar.com
/* 网站:http://www.willar.com;
/* 作者: gguoqing
/* 时刻: 2006/05/30
/*
/*【版权】COPYRIGHT(C)伟纳电子www.willar.comALL RIGHTS RESERVED
/*【声明】此程序仅用于学习与参阅,引证请注明版权和作者信息!
/*
/******************************************************************/
#include
#include
#define uchar unsigned char
#define uintunsigned int
uchar co
uchar co
sbitK1 = P1^4; //正转
sbitK2 = P1^5; //回转
sbitK3 = P1^6;
sbitK4 = P1^7; //中止
sbitBEEP = P3^7; //蜂鸣器
/********************************************************/
/*
/* 延时t毫秒
/* 11.0592MHz时钟,延时约1ms
/*
/********************************************************/
void delay(uint t)
{
uint k;
while(t–)
{
for(k=0; k<125; k++)
{ }
}
}
/**********************************************************/
void delayB(uchar x)//x*0.14MS
{
uchar i;
while(x–)
{
for (i=0; i<13; i++)
{ }
}
}
/**********************************************************/
void beep()
{
uchar i;
for (i=0;i<100;i++)
{
delayB(4);
BEEP=!BEEP; //BEEP取反
}
BEEP=1;//封闭蜂鸣器
}
/********************************************************/
/*
/*步进电机正转
/*
/********************************************************/
voidmotor_ffw()
{
uchar i;
uintj;
for (j=0; j<12; j++)//转1*n圈
{
if(K4==0)
{break;}//退出此循环程序
for (i=0; i<8; i++) //一个周期转30度
{
P1 = FFW[ i ];//取数据
delay(15); //调理转速
}
}
}
/********************************************************/
/*
/*步进电机回转
/*
/********************************************************/
voidmotor_rev()
{
uchar i;
uintj;
for (j=0; j<12; j++) //转1×n圈
{
if(K4==0)
{break;} //退出此循环程序
for (i=0; i<8; i++)//一个周期转30度
{
P1 = REV[ i ];//取数据
delay(15); //调理转速
}
}
}
/********************************************************
*
*主程序
*
*********************************************************/
main()
{
uchar r,N=5; //N 步进电机运转圈数
while(1)
{
if(K1==0)
{
beep();
for(r=0;r { motor_ffw(); //电机正转 if(K4==0) {beep();break;}//退出此循环程序 } } else if(K2==0) { beep(); for(r=0;r { motor_rev(); //电机回转 if(K4==0) {beep();break;}//退出此循环程序 } } else P1 = 0xf0; } } 汇编言语典范 ;/***************************************************************** ;/* ;/* ME300系列单片机开发体系演示程序 – 步进电机键控正回转试验 ;/* ;/* ;/* 邮箱:gguoqing@willar.com ;/* 网站:http://www.willar.com; ;/* 作者: gguoqing ;/* 时刻: 2006/05/30 ;/* ;/*【版权】Copyright(C)伟纳电子www.willar.comAll Rights Reserved ;/*【声明】此程序仅用于学习与参阅,引证请注明版权和作者信息! ;/* ;/****************************************************************** ; 步进电机步进角为 7.5度,一圈 360 度。 ; 双四拍作业方式: ; AB-BC-CD-DA (即一个脉冲,转 7.5 度) ; 单双八拍作业方式: ; A-AB-B-BC-C-CD-D-DA (即一个脉冲,转 3.75 度) ; 一个取数作业周期,步进电机转30度 ; 步进电机转一圈需求12个取数作业周期 ;——————————————————- ; A组线圈对应 P1.0(桔色) ; B组线圈对应 P1.1(棕色) ; C组线圈对应 P1.2(黄色) ; D组线圈对应 P1.3(黑色) ;——————————————————- K1BITP1.4 ;步进电机正转 K2BITP1.5 ;步进电机回转 K3BITP1.6 K4BITP1.7 ;步进电机中止滚动 BEEPBITP3.7 ;——————————————————- ORG 0000H LJMP MAIN ORG 0030H ;——————————————————- MAIN: MOVSP,#60H MOVP1,#0F0H ;封闭步进电机,键输入线置高 MAIN1: JBK1,MAIN2 ACALLBEEP_BL ;步进电机正转 ACALLFFW MAIN2: JBK2,MAIN1 ACALLBEEP_BL ;步进电机回转 ACALLREV JMPMAIN1 ;————————正转————————- FFW: ;MOV R3,#12 ;7.5度电机正转1圈共12个周期 MOVR3,#60 ;转5圈 FFW1: MOV R0,#00H FFW2: JBK4,FFW3 ;停止步进电机运转 ACALLBEEP_BL JMPFFW4 FFW3: MOV P1,#0F0H MOV A,R0 ;MOV DPTR,#TABLE_F;挑选作业方式 MOV DPTR,#TABLE1 MOVC A,@A+DPTR MOV P1,A LCALL DELAY INC R0 CJNEA,#0FFH,FFW2 DJNZ R3,FFW1 FFW4: MOV P1,#0F0H RET ;—————————回转————————– REV: ;MOV R3,#12 ;7.5度电机回转1圈共12个周期 MOVR3,#60 ;转5圈 REV1: MOV R0,#00H REV2: JBK4,REV3;停止步进电机运转 ACALLBEEP_BL JMPREV4 REV3: MOV P1,#0F0H MOV A,R0 ; MOV DPTR,#TABLE_R ;挑选作业方式 MOV DPTR,#TABLE2 MOVC A,@A+DPTR MOV P1,A CALL DELAY INC R0 CJNEA,#0FFH,REV2 DJNZ R3,REV1 REV4: MOV P1,#0F0H RET ;——————————————————- DELAY: MOV R7,#40 ;步进电机的转速 DEL1:MOV R6,#248 DJNZ R6,$ DJNZ R7,DEL1 RET ;——————————————————- DELAY1: MOV R5,#20 ;2S 延时子程序 DEL2: MOV R7,#200 DEL3: MOV R6,#250 DJNZR6,$ DJNZR7,DEL3 DJNZR5,DEL2 RET ;——————————————————- ; 单双八拍作业方式 TABLE_F:;正转表 DB0F1H,0F3H,0F2H,0F6H,0F4H,0FCH,0F8H,0F9H DB0FFH TABLE_R:;回转表 DB0F9H,0F8H,0FCH,0F4H,0F6H,0F2H,0F3H,0F1H DB0FFH ;——————————————————- ; 双四拍作业方式: TABLE1: DB 0F3H,0F6H,0FcH,0F9H;正转表 DB 0FFH;正转完毕 TABLE2: DB 0F9H,0FCH,0F6H,0F3H;回转表 DB 0FFH;回转完毕 ;——————————————————– ;蜂鸣器响一声子程序 ;——————————————————– BEEP_BL: MOVR6,#100 BL1: CALLDEX1 CPLBEEP DJNZR6,BL1 RET DEX1: MOVR7,#180 DEX2: NOP DJNZR7,DEX2 RET ;——————————————————— END
四相步进电机:
齿距角: Qz = 2π/ Z Z — 转子的齿数
步距角---转子走一步所转过的视点
步距角: Qn = Qz/N = 2π/NZN — 步进电机作业拍数
步进电机转速:
n = 60×f / N×Z (转/分); f =脉冲频率(Hz)
关于步距角为7.5度的步进电机而言:
Qn = 7.5度
Qz = Qn×N = 7.5×4=30度 (齿距角)
Z=2π/Qz = 360/30 = 12 (转子的齿数)
四相步进电机有三种运转状况:
1、步进电机为四相单四拍运转状况:
当电机绕组通电时序为A-B-C-D时为正转,通电时序为D-C-B-A时为回转。
N = 4
步距角: Qn = Qz/N = 2π/NZ =360/4*12=7.5°
则步进电机转一圈所需步进数: 360°/7.5°=48 (步进数)
2、步进电机为四相双四拍运转状况:
当电机绕组通电时序为AB-BC-CD-DA时为正转,通电时序为DA-CD-BC-AB时为回转。
N = 4
步距角: Qn = Qz/N = 2π/NZ =360/4*12=7.5°
则步进电机转一圈所需步进数: 360°/7.5°=48 (步进数)
3、步进电机为四相八拍运转状况。
当电机绕组通电时序为A-AB-B-BC-C-CD-D-DA时为正转,通电时序为DA-D-CD-C-BC-B-BA-A时为回转。
N = 8
步距角: Qn = Qz/N = 2π/NZ =360/8*12=3.75°
则步进电机转一圈所需步进数: 360°/3.75°=96 (步进数)