摘要 针对现在泊车辅佐体系中的车位线辨认问题,建立了依据360°全景俯瞰图画的全主动车位线检测与辨认模型,考虑到光照对图画处理成果的影响,先对图画进行了预处理,然后选用一种依据中值的自适应Canny边际检测技能,并经过Hough改换,再依据车位线特征的先验常识对Hough改换成果进行约束和优化,完结了车位线的辨认。一起对实践收集到的图画进行验证,成果辨认率到达94.2%,证明了该办法的有用性和鲁棒性。
关键词 泊车辅佐;车位线辨认;自适应Canny;Hough改换
近年来跟着对泊车辅佐体系需求的快速增长,提出了多种车位定位的办法,这些办法大致可分为4类:依据用户界面的、依据设备的、依据闲暇位的和依据车位线的办法。与其他办法比较,依据车位线的办法有以下优势:(1)能够与依据用户界面的办法结合运用来削减因为司机重复操作带来的不方便,而这是依据用户界面办法的首要缺点。(2)不同于依据闲暇位的办法,它能更精确地定位停车位,因为其定位进程不依赖于相邻轿车的停放姿态而仅依赖于车位线。(3)它也能够有用地运用于歪斜车位的状况。因为传感器的局限性,运用超声波传感器依据闲暇位的办法在歪斜车位的状况下会失效。(4)与运用双目或许运动声波的依据闲暇位的办法比较,它一般花费少数时刻。(5)它不需求额定的传感器,例如立体摄像头、扫描激光雷达或许短波雷达,而是运用后视摄像头。
依据车位线的办法能够分为半主动和全主动的办法。与全主动的办法比较,半主动的办法或许发生更牢靠的成果,并且花费更少的核算资源,因为它有来自人的额定信息。Jung等人提出了一种办法,这种办法需求司机在预停车位内符号一个点,然后运用方向梯度来进行辨认。试验验证这种办法只适用一种类型的车位。为战胜此缺点,提出了别的一种办法,能够辨认各种类型的车位,但需求用户更多的合作。这种办法需求用户输入车位两端点的初始方位,构成了车位的进口。依据这些初始方位,选用人工神经网络和遗传算法进行车位的辨认。
别的,全主动的办法也得到了开展。XU等人提出了一种依据色彩切割技能的的办法辨认车位线,这种办法只能辨认赤色车位线,并且依据色彩信息的办法现已被证明对光照改动是灵敏的。Tanaka等人提出了一种对边际片段运用RANSAC检测一组直线来辨认车位线。因为这种办法高度依赖于直线检测,其功用会因为部分污损而下降。Jung等人提出的办法将各种类型的车位线模型化为一种分层树结构,依据这种结构完结主动辨认。
可是,以上提出的办法都涉及到阈值,所以都会存在图画处理范畴一个遍及的问题,即阈值设置过高,重要信息就或许被遗失;阈值设置过低,搅扰信息又会被看的重要,因而一个适用于一切图画的普适阈值难以给出,所以针对以上问题,本文选用了自适应的思维,包含自适应直方图均衡化、自适应二值化、自适应Canny边际检测,以满意运用的需求,试验证明这些算法都是有用的。
本文提出的办法可分为以下几个进程:对轿车前、后、左、右4个摄像头收集到的图画进行重建构成全景图画;图画预处理,包含直方图均衡化,二值化以及形状学处理;Canny边际检测以及Hough改换,然后在参数空间中运用车位线特征的先验信息对成果进行优化,终究得出辨认成果。详细算法流程如图1所示。

1 图画预处理
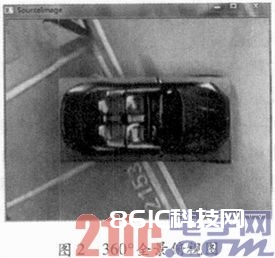
经过加装在轿车车身前、后、左、右的4个鱼眼摄像头,一起收集车辆四周的印象,经过鱼眼图画纠正,俯瞰改换和拼接后,构成一幅车辆4周的360°全景俯视图,如图2所示。
由此得到的原图画不可避免地会遭到光照、噪声等的影响,因为前期处理的质量直接影响到后期辨认的作用,所认为消除图画中无关的信息,康复有用的实在信息,增强有关信息的可检测性和最大极限地简化数据,然后改善特征抽取、图画切割、匹配和辨认的牢靠性,需求对图画进行预处理,首要分为以下几个进程。
1.1 自适应直方图均衡化
首先将原五颜六色转化为灰度图画,考虑到光照影响导致灰度散布不均,需求对灰度图画进行直方图均衡化。直方图均衡化的根本思维是对原始图画中的像素作某种映射改换,使改换后的图画灰度概率密度是均匀散布的,即改换后图画是一幅灰度级均匀散布的图画,这意味着图画灰度的动态规模得到了添加,然后可进步图画的比照度。可是传统的直方图均衡化中灰度改换函数运算与像素所在的方位无关,这种全局性处理的算法,具有算法简略、核算速度快等长处,但因为其对一切像素点都做相同的处理,疏忽了图画的部分特征,这就导致经过直方图均衡的图画将丢掉有用信息,给图画的去噪处理及边际检测带来丢失。因而本文选用比照度受限自适应直方图均衡法(CLAHE),经过约束部分直方图的高度来约束部分比照度的增强起伏,然后约束噪声的扩大及部分比照度的过增强。如图3所示为别离对原灰度图画进行直方图均衡化和CLAHE后的作用,能够看到CLAHE的作用显着优于传统的直方图均衡作用。

1.2 自适应二值化
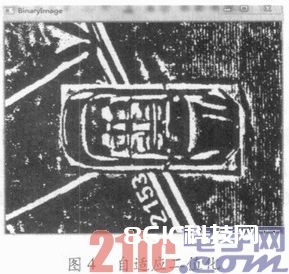
对图画进行直方图均衡化处理后,为便于后期处理,需求对图画进行切割操作,到达方针和布景别离的意图。图画切割的关键是选取恰当的阈值,阈值选取的恰当与否直接影响到感兴趣信息的提取。这儿选用部分自适应阈值,它是依据像素邻域块的像素值散布来确认该像素方位上的二值化阈值。这样做的长处在于,每个像素方位处的二值化阈值不是固定不变的,而是由其周围邻域像素的散布来决议的。亮度较高图画区域的二值化阈值一般会较高,而亮度较低的图画区域的二值化阈值则会相适应地变小。不同亮度、比照度、纹路的部分图画区域将会具有相对应的部分二值化阈值。图4显现了选用该办法后的成果。
1.3 形状学处理
能够看到,在图画切割完结后,难免存在着一些二值噪点,为此,考虑运用形状学对图画进行处理。对二值图画进行形状学处理的根本思维是运用一个预先界说好的简略结构元素去勘探图画,看这个结构元素能否填放在该图画内部,并验证填放结构元素办法的有用性。最根本的形状学运算是腐蚀和胀大,二者互为对偶运算。腐蚀是将区域的内鸿沟点变为布景,使鸿沟向内部缩短,在这个进程中,小且无意义的物体将被消除;而胀大则是将区域的外鸿沟点变为方针点,使鸿沟向外部扩张。
为运用结构元素B胀大调集A,可将B相对原点旋转180°,得到-B,再运用-B对AC进行腐蚀,腐蚀成果的补集便是所求的成果。
对输入图画进行先腐蚀后胀大,具有滑润功用,一般用于消除小方针物、在纤细点处别离物体、滑润较大物体鸿沟的一起并不显着改动其体积,且图画细节得以保存。图5是经过先腐蚀后胀大得到的成果,能够看到经过形状学处理后的二值化图画现已滤掉了部分噪点,便于下一步的辨认处理。

2 Hough改换检测车位线
2.1 依据中值的自适应Canny边际检测
边际是图画特征的一个重要特点,蕴含了很多的信息,能勾勒出方针物体,因而边际检测技能是图画处理中一类重要的剖析办法。Can ny算子是最常用的边际检测办法。Canny算法的进程可概括为:
(1)去噪。因为Canny边际检测算子关于未经处理的原始图画中的噪声是灵敏的,所以它选用高斯模板与原始图画作卷积,得到的成果与原始图画比较,有细微的含糊。这样,独自的一个噪声像素在经过高斯滑润的图画上变得根本没有影响。
(2)查找图画的亮度梯度。图画的一个边际或许指向不同的方向,所以Canny算法运用4个模板别离检测去噪图画中的笔直、水平、对角线边际。运用边际检测算子(如Roberts,Prewitt,Sobel)别离核算出水平缓笔直方向的一阶导数Gx和Gy由此能够得到边际的梯度和方向

(3)盯梢图画边际,挑选滞后阈值。较大的亮度梯度更有或许被认为是边际,但在多种状况下,指定一个阈值来确认某个梯度是否为边际是不或许的,因而Canny选用了滞后阈值。
滞后阈值需求凹凸两个阈值。假定图画中的重要边际都是接连曲线,这样能够盯梢给定曲线中含糊的部分,并丢掉一些尽管发生了大的梯度但没有组成曲线的噪声像素。所以从一个较大的阈值开端,这将标识出那些坚信的边际。从真实的边际开端,并运用前面导出的方向信息,在图画中盯梢整个的边际。在边际盯梢时选用低阈值,这样就能够盯梢曲线的含糊部分直至回到起点。
这个进程一旦完结,就可得到一个二值图画,其间的每个点表明是否是一个边际点。
与运用一个阈值比较,Canny边际检测算法运用两个阈值使得操作愈加灵敏,但仍是存在的遍及问题,阈值设置过高,重要信息就或许被漏掉;阈值设置过低,搅扰信息又会被看的重要。难以给出适用于一切图画的通用阈值问题。
选用的解决办法首先是核算图画的中值median,然后依据以下公式为高阈值high_thresh和低阈值low_thresh赋值,调用Canny边际检测算法对图画进行边际检测。
high_thresh=0.66×median;
low_thresh=0.33×median; (4)
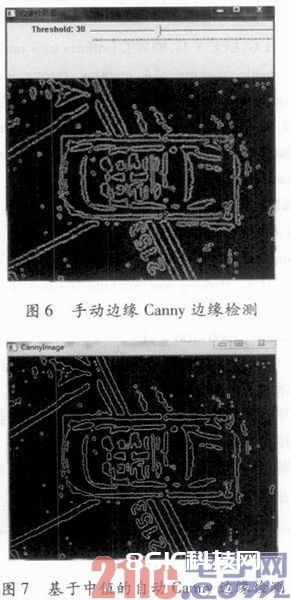
图6和图7别离显现了经典Canny边际检测和依据中值的Canny边际检测成果,其间图6是经过手动调整到最佳成果发生的图画,图7是运用主动设定阈值得到的成果,从中能够看出依据中值的Canny边际检测算法能够完结主动边际检测的意图。
2.2 Hough改换
霍夫改换(Hough Transform)是一种检测直线和解析曲线的有用办法。它把二值图画改换到Hough参数空间,运用参数空间极值点的检测来完结方针的检测。霍夫改换不光能够用于检测图画中的直线,还能够扩展到恣意曲线的辨认,多为圆和椭圆。
运用两个坐标空间之间的改换,霍夫改换将在一个空间中具有相同形状的曲线映射到另一个坐标空间的一个点上构成峰值,因而,霍夫改换把曲线的检测问题转换到参数空间中对点的检测问题,经过在参数空间里进行简略的累加核算完结检测使命。
考虑直角坐标系中的一点(x0,y0),经过该点直线的一般方程能够写为
ρ=x0cosθ+y0sinθ (5)
参数ρ和θ能够仅有地确认一条直线,这在ρ-θ空间内是一条正弦曲线。若将x—y平面内同一条直线的点列改换到ρ-θ空间,则所以正弦曲线都经过一点(ρ’,θ’),所以正弦曲线在ρ-θ空间其他遍地都不相交。因而,X—Y平面内一条直线上的无数点改换到ρ—θ空间内时,经过(ρ’,θ’)的次数为无量,经过其他遍地次数都为1。也便是说,Hough改换将X—Y平面内的一条直线映射到了ρ—θ空间中的一个点。因而,Hough改换把直线检测问题转换到参数空间里对点的检测问题,经过在参数空间里进行简略的累加核算完结检测使命。
图8为将Hough改换运用到边际检测图中得到的初始成果。

能够看到,由以上进程得到的成果存在伪车位线,需求进一步对成果进行优化。注意到,在进行边际检测后每条车位线都是双边际的,别的,这两个边际是彼此平行的且具有固定的宽度和近似持平的长度,并且它们都反响了同一条车位线,因而为了削减核算量,能够核算一个边际,而非两个边际,在这儿取两条边际线的平均值作为实践的车位线。依据以上先验特征对初始辨认成果进行条件约束及优化,得到如图9所示的终究辨认成果。

3 试验成果及剖析
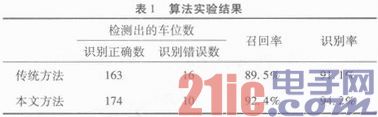
体系的硬件部分首要由鱼眼摄像头、图画处理单元和显现屏组成。因为车身内部空间有限,图画处理单元无法由PC机完结,因而在本体系中,规划运用DSP来完结视频图画的处理。软件部分,以Visual Studio 2008为开发环境,并调用OpenCV库来完结算法的完结。试验选取了200张不同状况下的车位图画对算法进行了验证,并在相同的状况下将本文的办法与传统的Hough办法进行了比照,试验中选用召回率和辨认率来对算法的功率进行估量,其界说别离如下。

从试验能够看出,本文提出的依据自适应思维的车位线检测与辨认办法具有较高的精确度和鲁棒性。
4 结束语
跟着停车难的问题日益严峻,泊车辅佐体系的运用越来越广泛,本文提出了一种归纳运用自适应边际检测和Hough改换等算法进行主动辨认车位线的办法。经过实践收集到的图画对算法进行验证,并与传统办法进行了比照,验证了本文所提办法的高精度和高鲁棒性。