



近日,河北小漫电子商务有限公司宣布新增代理产品线,正式成为MSKSEMI(美森科半导体)的代理商。这一合作标志着小漫电子在电子元器件代理领域的进一步拓展,同时也为MSKSEMI在华...

河北小漫电子商务有限公司为HXY MOSFET(华轩阳电子) SI2302-HXY 场效应管(MOSFET)的代理商,授权经销华轩阳全系列产品,欢迎前来咨询。 华轩阳电子专注为数...

河北小漫电子商务有限公司代理YANGJIE(扬杰)全系列产品,常备现货库存YANGJIE(扬杰)2SC1623-L6 15000只。欢迎前来咨询18518250886或156900...

脉冲雷达,是一种常用的测距和目标识别雷达,广泛应用于航空航天、警戒系统、气象预测等多个领域。通过在发送端发送窄脉冲,以及接收端收到的被目标反射回的信号,来进行测距与定位。在雷达研发...

摘要ADI公司A²B®总线的全新增强功能为数据和音频传输与分发带来新的发展。智能楼宇、大厅、房间或智能家居均可从新型收发器的众多集成特性中获益。新的A2B增强功能包括总线长度更长,...

ADC 的 SPICE 模拟反复试验的方法将信号发送到 ADC 非常耗时,而且可能有效也可能无效。如果转换器捕获电压信息的关键时刻模拟输入引脚不稳定,则无法获得正确的输出数据。SP...
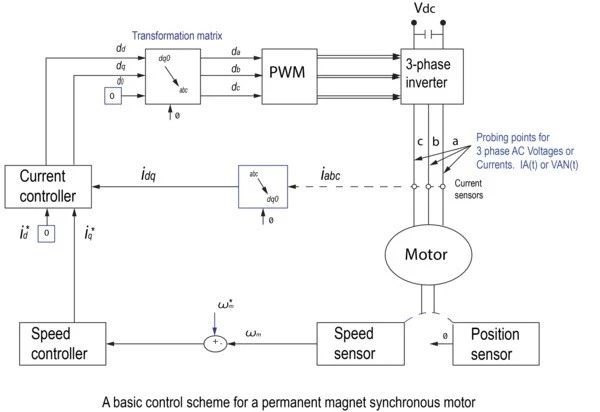
背景电机电驱是新能源汽车的核心部件,其性能和可靠性直接影响汽车的动力和安全。尽管示波器可以以高采样率去捕获电压和电流的波形,但需要进一步计算才能从数据中生成关键的功率测量值和其他相...

三相电电压不够220伏的原因三相电电压不够220伏(实际上应为单相电压低于220伏,因为三相电电压通常是线电压380伏,而单相电压为220伏)的原因可能有以下几点:供电不稳定:当供...
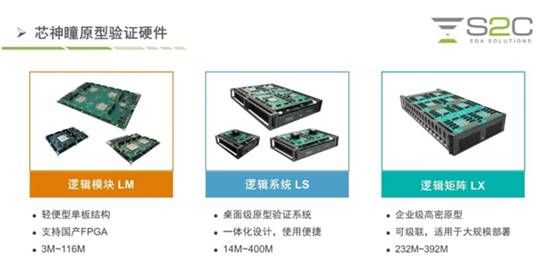
引言随着电子设计自动化(EDA)验证工具的重要性日益增加,开发者们开始寻求减少流片成本和缩短开发周期的方法。其中,使用可编程逻辑芯片(FPGA)来构建有效的验证流程成为一种流行的解...

从内燃机(ICE)向使用清洁能源的电动汽车(EV)转型,需要大量的技术投入,才能推动电动汽车在市场上广泛普及。此外,越来越多的国家宣布了逐步淘汰或者限制传统内燃机的计划。受到政...
