


乍一听,陀螺仪,这么巨大上的东西一般不会 有人了解,可是我信任大多数人应该都听过陀螺,如下图,看过《盗梦空间》的人必定对这个陀螺形象深化,其实它们的原理是相似的,可是陀螺仪到底是什么东西呢,下面我来为咱们简略介绍一下。

1.陀螺仪原理:陀螺仪是神马东东?
陀螺仪,是一种用来感测与坚持方向的设备,基於角动量不灭的理论规划出来的。陀螺仪首要是由一个位於轴心能够旋转的轮子构成。 陀螺仪一旦开端旋转,由於轮子的角动量,陀螺仪有抵抗方向改动的趋向。陀螺仪多用於导航、定位等体系。

1850年法国的物理学家福柯(J.Foucault)为了研讨地球自转,首要发现高速滚动中的转子(rotor),由于惯性作用它的旋转轴永久指向一固定方向,他用希腊字gyro(旋转)和skopein(看)两字合为gyro scopei一字来命名这种外表。
万万想不到的是鸡头便是一个十分完美的陀螺仪,不管你怎样动鸡的身体,它总是能hold住自己的头,太强壮了!

已然鸡头天然生成是陀螺仪,老外就加了个摄像头,拍出来画面更是你幻想不到的。
2.陀螺仪原理:陀螺仪的根本组成与分类
2.1陀螺仪的根本组成
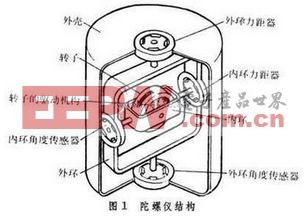
陀螺仪的设备,一直是航空和帆海上飞翔姿势及速率等最便利有用的参阅外表。从力学的观念近似的剖析陀螺的运动时,能够把它看成是一个刚体,刚体上有一个万向支点,而陀螺能够绕着这个支点作三个自在度的滚动,所以陀螺的运动是归于刚体绕一个定点的滚动运动。更切当地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。将陀螺设备在结构设备上,使陀螺的自转轴有角滚动的自在度,这种设备的整体叫做陀螺仪,陀螺仪的根本部件有:
(1) 陀螺转子(常选用同步电机、磁滞电机、三相沟通电机等拖动办法来使陀螺转子绕自转轴高速旋转,并见其转速近似为常值):
(2) 内、外结构(或称内、外环,它是使陀螺自转轴取得所需角滚动自在度的结构);
(3) 附件(是指力矩马达、信号传感器等)。
2.2陀螺仪的分类
依照转子滚动的自在度分成双自在度陀螺仪(也称三自在度陀螺仪)和单自在度陀螺仪(也称二自在度陀螺仪)。前者用于测定飞翔器的姿势角,后者用于测定姿势角速度,因而常称单自在度陀螺仪为。但一般多按陀螺仪中所选用的支承办法分类。
滚珠轴承自在陀螺仪 它是经典的陀螺仪。运用滚珠轴承支承是运用最早、最广泛的支承办法。滚珠轴承靠直触摸摸,冲突力矩大,陀螺仪的精度不高,漂移率为每小时几度,但作业牢靠,迄今还用在精度要求不高的场合。一个自在转子陀螺仪(双自在度陀螺仪)靠内环轴和外环轴视点传感元件能够丈量两个姿势角。

液浮陀螺仪 又称浮子陀螺。内结构(内环)和转子构成密封球形或圆柱形的浮子组件。转子在浮子组件内高速旋转,在浮子组件与壳体间充以浮液,用以发生所需求的浮力和阻尼。浮力与浮子组件的分量持平者,称为全浮陀螺;浮力小于浮子组件分量者称为半浮陀螺。由于运用浮力支承,冲突力矩减小,陀螺仪的精度较高,但因不能定位仍有冲突存在。为补偿这一缺乏,一般在液浮的基础上添加磁悬浮,即由浮液承当浮子组件的分量,而用磁场构成的推力使浮子组件悬浮在中心方位。此外,还可运用高速旋转的转子与内结构之间所构成的动压气膜支承转子,这种办法称为动压气浮支承。现代高精度的单自在度液浮陀螺常是液浮、磁浮和动压气浮并用的三浮陀螺仪。这种陀螺仪比滚珠轴承陀螺仪的精度高,漂移率为0.01度/时。但液浮陀螺仪要求较高的加工精度、严厉的设备、准确的温控,因而本钱较高。

静电陀螺仪 又称电浮陀螺。在金属球形空心转子的周围装有均匀分布的高压电极,对转子构成静电场,用静电力支承高速旋转的转子。这种办法归于球形支承,转子不仅能绕自转轴旋转,一起也能绕垂直于自转轴的任何方向滚动,故属自在转子陀螺仪类型。静电场仅有吸力,转子离电极越近吸力就越大,这就使转子处于不稳定状况。用一套支承电路改动转子所受的力,可使转子坚持在中心方位。静电陀螺仪选用非触摸支承,不存在冲突,所以精度很高,漂移率低达10 ~10 度/时。它不能接受较大的冲击和振荡。它的缺陷是结构和制作工艺杂乱,本钱较高。

挠性陀螺仪 转子装在弹性支承设备上的陀螺仪。在挠性陀螺仪中运用较广的是动力调谐挠性陀螺仪。它由内挠性杆、外挠性杆、平衡环、转子、驱动轴和电机等组成。它靠平衡环扭摆运动时发生的动力反作用力矩(陀螺力矩)来平衡挠性杆支承发生的弹性力矩,然后使转子成为一个无约束的自在转子,这种平衡便是调谐。挠性陀螺仪是60年代敏捷开展起来的惯性元件,它因结构简略、精度高(与液浮陀螺附近)、本钱低,在飞机和导弹上得到了广泛运用。

激光陀螺仪 它的结构原理与上面几种陀螺仪彻底不同。激光陀螺实际上是一种环形激光器,没有高速旋转的机械转子,但它运用激光技能丈量物体相对于惯性空间的角速度,具有速率陀螺仪的功用。激光陀螺仪的结构和作业是:用热膨胀系数极小的资料制成三角形空腔。在空腔的各极点别离设备三块反射镜,构成闭合光路。腔体被抽成真空,充以氦氖气,并装设电极,构成激光发生器。激光发生器发生两束射向相反的激光。当环形激光器处于停止状况时,两束激光绕行一周的光程持平,因而频率相同,两个频率之差(频差)为零,干与条纹为零。当环形激光器绕垂直于闭合光路平面的轴滚动时,与滚动方向共同的那束光的光程延伸,波长增大,频率下降;另一束光则相反,因而呈现频差,构成干与条纹。单位时刻的干与条纹数正比于滚动角速度。激光陀螺的漂移率低达0.1~0.01度/时,牢靠性高,不受线加速度等的影响,已在飞翔器的惯性导航中得到运用,是很有开展前途的新式陀螺仪。

处在研发过程中的光导纤维陀螺仪正逐渐成为有用的外表。其他新式原理的陀螺仪,如核子共振陀螺仪等,还处在研讨阶段。
3. 陀螺仪原理:陀螺仪原理与特性
3.1陀螺仪原理
陀螺仪是在动态中坚持相对盯梢状况的设备,由于其原理的杂乱性,咱们借助于图来看看陀螺仪的原理。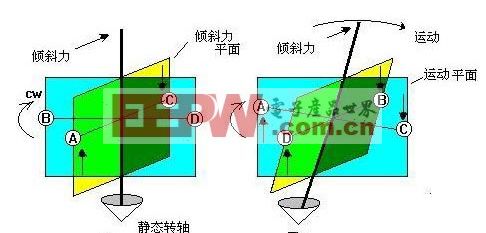
图2 图3
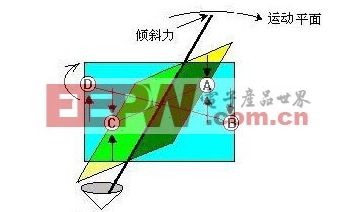
图4
如图所示,轴的底部被托住停止可是能够各个方向旋转。当一个歪斜力作用在顶部的轴上的时分,质点A向上运动,质点C则向下运动,如其间的子图2。由于陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会抵达质点B的方位。CD两个质点的状况也是相同的。子图2中质点A当处于如图的90度方位的时分会持续向上运动,质点C也持续向下。AC质点的组合将导致轴在子图3所示的运动平面内运动。一个陀螺仪的轴在一个适宜的视点上旋转,在这种状况下,假如陀螺仪逆时针旋转,轴将会在运动平面上向左运动。假如在顺时针的状况中,歪斜力是一个推力而不是拉力的话,运动将会向左发生。在子图4中,当陀螺仪旋转了另一个90度的时分,质点C在质点A受力之前的方位。C质点的向下运动现在受到了歪斜力的阻止而且轴不能在歪斜力平面上运动。歪斜力推轴的力气越大,当边际旋转大约180度时,另一侧的边际推进轴向回运动。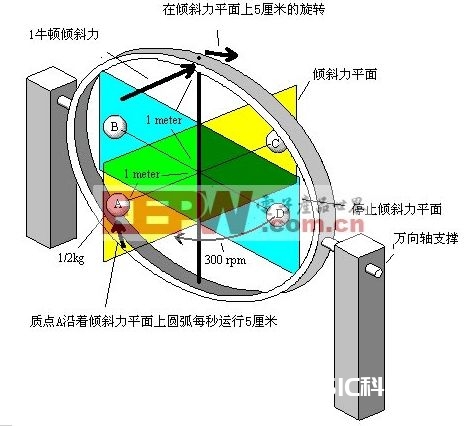
实际上,轴在这个状况下将会在歪斜力的平面上旋转。轴之所以会旋转是由于质点AC在向上和向下运动的一些能量竭尽导致轴在运动平面内运动。当质点AC最终旋转到大致上相反的方位上时,歪斜力比向上和向下的阻止运动的力要大。
3.2陀螺仪的特性
陀螺仪具有两个特性:①定轴性:高速旋转的转子具有力求坚持其旋转轴在惯性空间内的方向稳定性不变的特性。转子角动量即矢量H(图5[陀螺仪的进动现象])是转子绕自转轴的滚动惯量J和自转角速度 的乘积(H=J )。定轴性是指矢量[kg2]H[kg2]力求坚持指向不变。②进动性:在外力矩作用下,旋转的转子力求使其旋转轴沿最短的途径趋向外力矩的作用方向。图3中陀螺仪转子在重力G作用下不从支点掉下,而以角速度[kg2]ω[kg2]绕垂线不断滚动,这便是进动。进动角速度[kg2]ω=L/H,其间L为外力矩,这儿指重力发生的力矩。搅扰力矩引起转子的进动角速度称为陀螺的漂移率,单位为度/时,是衡量陀螺仪功用的首要目标。
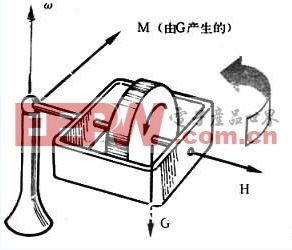
图5 陀螺仪进动现象
4.陀螺仪原理:陀螺仪的运用
陀螺仪器最早是用于帆海导航,但随着科学技能的开展,它在航空和航天事业中也得到广泛的运用。陀螺仪的运用间隔咱们最近的便是咱们的手机,陀螺仪在手机中的作用首要体现在以下几个方面:
榜首大用处,导航。陀螺仪自被创造开端,就用于导航,先是德国人将其运用在V1、V2火箭上,因而,假如合作GPS,手机的导航才能将到达史无前例的水准。现在许多专业手持式GPS上也装了陀螺仪,假如手机上设备了相应的软件,其导航才能绝不亚于现在许多船只、飞机上用的导航仪。

第二大用处,能够和手机上的摄像头合作运用,比方防抖,这会让手机的摄影摄像才能得到了很大的提高。
第三大用处,各类游戏的传感器,比方飞翔游戏,体育类游戏,乃至包含一些榜首视角类射击游戏,陀螺仪完好监测游戏者手的位移,然后完成各种游戏操作作用。有关这点,想必用过任天堂WII的兄弟会有很深的感触。

第四大用处,能够用作输入设备,陀螺仪相当于一个立体的鼠标,这个功用和第三大用处中的游戏传感器很相似,乃至能够认为是一种类型。
第五大用处,也是未来最有远景和运用规模的用处。下面要点说说。那便是能够协助手机完成许多增强实际的功用。增强实际是近期才冒出的概念,和虚拟实际相同,是计算机的一种运用。粗心是能够经过手机或许电脑的处理才能,让人们对实际中的一些物体有跟深化的了解。假如咱们不理解,举个比方,前面有一个大楼,用手机摄像头对准它,立刻就能够在屏幕上得到这座大楼的相关参数,比方楼的高度,宽度,海拔,假如连接到数据库,乃至能够得到这座大厦的物主、建造时刻、现在的用处、可包容的人数等等。
陀螺仪原理—参阅资料
1、陀螺仪原理
描绘:陀螺仪原理的总结剖析
2、MEMS陀螺仪的简略校准
描绘:MEMS陀螺仪的简略校准
3、经过校准改进MEMS陀螺仪的精度和稳定性
描绘:改进MEMS陀螺仪的精度和稳定性的办法






