DC-DC开关电源因体积小,重量轻,效率高,功用安稳等长处在电子、电器设备,家电范畴得到了广泛应用,进入了快速发展期。DC-DC开关电源选用功率半导体作为开关,经过操控开关的占空比调整输出电压。其操控电路拓扑分为电流形式和电压形式,电流形式操控因动态反响快、补偿电路简化、增益带广大、输出电感小和易于均流等长处而被广泛应用。电流形式操控又分为峰值电流操控和均匀电流操控,峰值电流的长处为:1)暂态闭环呼应比较快,对输入电压的改动和输出负载的改动瞬态呼应也比较快;2)操控环易于规划;3)具有简略主动的磁平衡功用;4)具有瞬时峰值电流限流功用等。可是峰值电感电流或许会引起体系呈现次谐波振动,许多文献虽对此进行必定的介绍,但都没有对次谐波振动进行体系研讨,特别是其发生原因和详细的电路完成,本文将对次谐波振动进行体系研讨。
1 次谐波振动发生原因
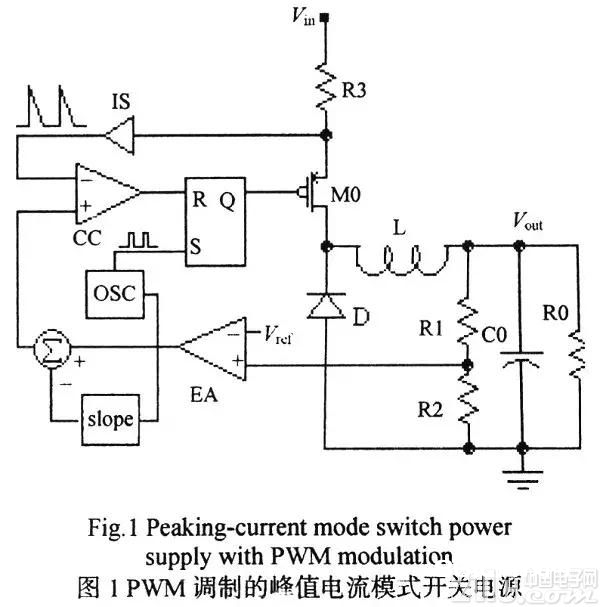
以PWM调制峰值电流形式开关电源为例(如图1所示,并给出了下斜坡补偿结构),对次谐波振动发生的原因从不同的视点进行详细剖析。
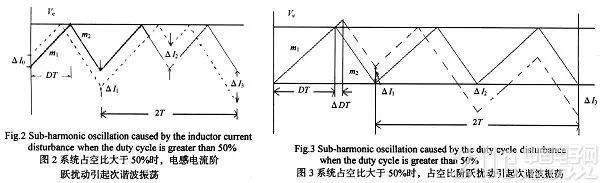
关于电流内环操控形式,图2给出了当体系占空比大于50%且电感电流发生细小阶跃△厶时的电感电流改动状况,其间实线为体系正常作业时的电感电流波形,虚线为电感电流实践作业波形。能够看出:1)后一个时钟周期的电感电流差错比前一个周期的电感电流差错大,即电感电流差错信号振动发散,体系不安稳;2)振动周期为开关周期的2倍,即振动频率为开关频率的1/2,这便是次谐波振动称号的由来。图3给出了当体系占空比大于50%且占空比发生细小阶跃AD时电感电流的改动状况,能够看出体系相同会呈现次谐波振动。而当体系占空比小于50%时,尽管电感电流或占空比的扰动相同会引起电感电流差错信号发生振动,但这种振动归于衰减振动。体系是安稳的。
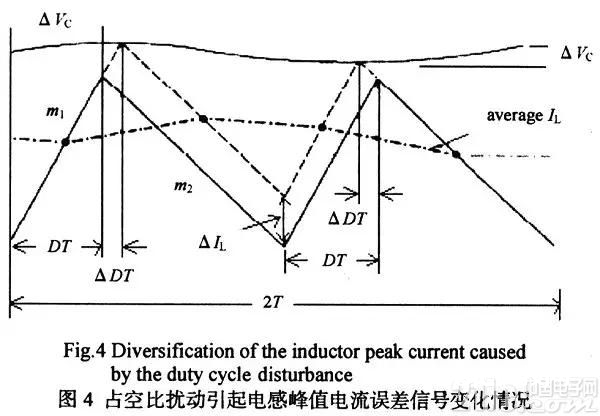
前面定性剖析了次谐波振动发生的原因,现对其进行定量剖析。针对图1,图4给出了占空比扰动引起电感峰值电流差错信号改动状况,其间Vc为差错运放的输出信号,当功率管MO导通即电感电流线性上升时,Vc随之添加,反之当功率管M0关断时,Vc随之减小。从图4能够看出当占空比在接连2个时钟脉冲下存在不对称时,体系将呈现次谐波振动。现推导△Vc与△IL的联系,占空比扰动△D引起电感电流与差错运放输出电压的改动值别离如式(1)和(2)所示,由式(1)和(2)可推导出Vc与△IL的联系如式(3)所示:
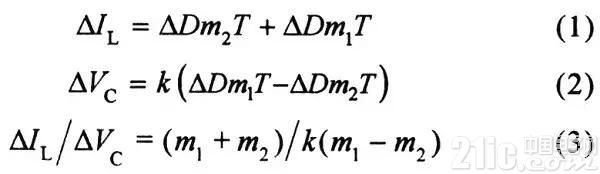
式中:T为开关周期;m1为峰值电流上升斜率;m2为峰值电流下降斜率绝对值;七代表采样电阻。
因为次谐波振动频率为开关频率的1/2,因而在1/2开关频率处的电压环路增益将直接影响电路的安稳性。现推导图1的电压环路增益,在差错运放输出端叠加斜坡补偿后,设差错电压从△Vc变为△Ve,然后可推出△Vc与△Ve的联系,如式(4)所示。由式(3)和(4)可得式(5),在稳态时可推出式(6),将式(6)代入式(5)消去m1,得式(7):
式中:m为下斜坡斜率;2表明次谐波振动周期是开关频率的2倍。
从图4能够看出△IL是周期为2T的方波,则第1个次谐波振幅应乘以4/π。假定负载电容为C,则从差错运放输出端到电源输出端的小信号电压增益为
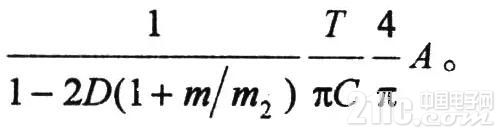
设差错运放电压增益为A,则电压外环环路增益为
由环路安稳性条件可知:在l/2开关频率处,环路相位裕度为零,此刻若环路增益大于l,体系就会发生次谐波振动,因而差错运放的最大增益为:
由式(8)能够显着看出,差错运放的最大增益是占空比D和斜坡补偿斜率m的函数,归一化的差错运放最大增益与D和m的联系如图5所示。能够看出:m=O(无补偿)时,因为运放增益不能小于O,当占空比大于或等于50%时,体系就会呈现次谐波振动;m=一m2/2时,D=100%才呈现次谐波振动,但在实践电路中D100%时就会呈现振动;m=一m2时,差错运放最大增益与占空比无关。当持续增大m时,对环路的安稳性影响不大,但过补偿会影响体系瞬态呼应特性。
上文研讨了电感电流信号改动波形对次谐波振动发生的原因及解决办法,现从s域(或频域)视点对其进行更深化的研讨。设采样电感电流i,经过采样电阻Rs转化成电压,i(k)表明第k时钟下的电流扰动量,△Ve(k+1)为第k+1时刻的电压操控扰动量,得采样坚持的离散时刻函数:
由式(10)可知当没有斜坡补偿,且m11,表明有1个极点在单位圆之外,此刻电流环不安稳。将H(z)转化为s域传递函数:

式中s表明频率。esT可用PadE可用Pade进行二阶近似:

式中Qs=2/[π(2/α-1)],即阻尼系数为1/Qs=[π(m1-m2+2m)]/[2(m1+m2)]。式(13)即为电流环传递函数,斜坡补偿前,当m1(m2-m1)/2即m>max[(m2-m1)/2]=m2/2时,Qs大于0,此刻电流环传递函数的极点将呈现在左半平面,此刻体系也不必定安稳,只要确保电流环具有满足的相位裕度时,体系才安稳。当m2>m>m2/2时,体系虽安稳,但此刻仍是会呈现振铃电流,只要当m=m2即阻尼系数为π/2时,体系才能在一个周期内消除振铃电流,然后取得非常好的瞬态呼应。当m>m2时,尽管电流环相位裕度添加,但其带宽变小,即呈现过补偿现象,此刻会影响体系的呼应速度。
2 斜坡补偿办法及电路完成
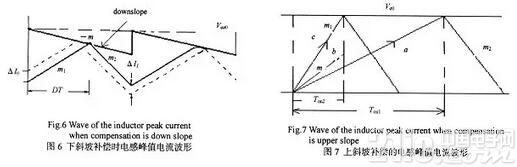
前文从几个方面研讨了次谐波振动发生的原因,而且指出斜坡补偿能防止体系出次谐波振动,现研讨补偿办法及其详细电路完成。开关电源斜坡补偿分为上斜坡补偿与下斜坡补偿2种办法。图6为下斜坡补偿原理,给出了下斜坡补偿时占空比大于50%的电感峰值电流波形(电流细小扰动作为鼓励信号)。与图2比较,仅Ve从水平直线改为下斜坡。从图6能够看出,引进斜坡补偿后,电流差错信号每经过一个时钟周期,起伏成份额衰减,最终消失。图7为上斜坡补偿原理,给出了占空比大于50%的电感峰值电流波形。其补偿原理便是在电感峰值电流a上叠加上斜坡补偿电流b,构成检测电流c,使占空比小于50%,安稳体系。因为上斜坡补偿电路完成相对简略,一般选用上斜坡补偿。
关于斜坡补偿,斜率越大,振动衰减越快,但补偿斜率过大,会形成过补偿。过补偿会加重斜坡补偿对体系开关电流约束目标的影响,然后下降体系的带载才能;另一方面,过补偿会影响体系瞬态呼应特性。一般挑选斜坡补偿斜率需根据需要折中考虑。关于Buck和Flyback转换器 ,补偿斜坡一般取峰值电流下降斜率m2即Vout/L,因为输出电压安稳,所以补偿值便于核算并安稳;关于Boost电路,补偿斜坡也一般取峰值电流下降斜率m2,即(Vout-Vin)/L但因为输入电压随电网改动,然后要求补偿值跟从输入电压的改动,此刻若为了电路规划简略,逼迫斜坡斜率固定,则或许呈现过补偿或欠补偿现象,下降电路功用并导致波形畸变。
,补偿斜坡一般取峰值电流下降斜率m2即Vout/L,因为输出电压安稳,所以补偿值便于核算并安稳;关于Boost电路,补偿斜坡也一般取峰值电流下降斜率m2,即(Vout-Vin)/L但因为输入电压随电网改动,然后要求补偿值跟从输入电压的改动,此刻若为了电路规划简略,逼迫斜坡斜率固定,则或许呈现过补偿或欠补偿现象,下降电路功用并导致波形畸变。
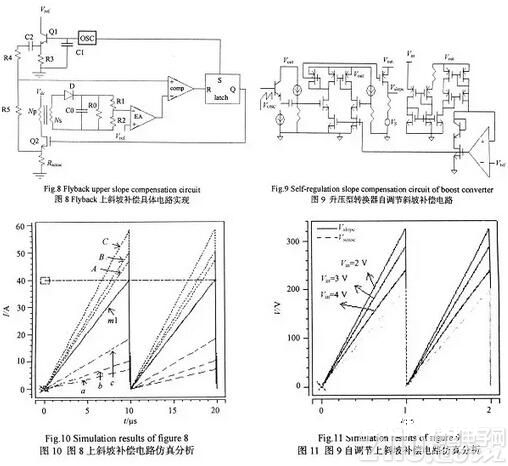
因Buck与Flyback转换器斜坡补偿原理电路完成根本相同,因而本文只给出了一种上斜坡补偿的Flyback斜坡补偿电路(图8所示)。图9为本文第二作者提出的一种升压型转换器自调理斜坡补偿电路。选用Hspice仿真软件别离对图8和图9进行仿真,仿真成果别离如图10和图11所示。图10的振动器频率为100 kHz。m1为检测电流曲线,其从0渐渐上升到40μA。虚线a,b和c代表具有不同斜率的斜坡补偿信号,线A,B和C别离为叠加后的曲线。从图10可看出:经过改动电阻R5和R4的比值,能够得到具有不同斜坡的补偿信号。图11中,Vsense为电感上的峰值电流流过检测电阻所发生的电压,Vslope为经上斜坡补偿后的检测电流流过检测电阻所发生的电压。从图11能够看出,不同的输入电压对应不同的补偿斜坡,而且斜坡改动与(Vout-Vin)的改动成正比即达到了自调理功用。
3 定论
本文对峰值电流形式开关电源的次谐波振动从定性和定量2个视点别离进行了体系研讨,当占空比大于50%时,体系的电流环在1/2开关频率处呈现振动,引进斜坡补偿后能确保电流环路增益的传输函数在1/2开关频率处具有较好的相位裕度,确保体系安稳。最终剖析了上斜坡补偿和下斜坡补偿2种防止次谐波振动的办法,并根据3种最根本的开关电源拓扑(Buck,Flyback和Boost)给出了详细的斜坡补偿电路及仿真成果。