0 导言:
当拍照镜头拍照运动的物体时,假如运动轨道已知,拍照镜头有必要对焦距进行调理,然后调整方针的像点的方位,使得方针一直坐落焦点上,到达实时拍照的方针,传统变焦大多是运用机械设备完结的,比方凸轮组织,齿条组织;可是因为机械加工工艺杂乱,其精度、平稳性和灵活性都难以满足要求,为此本体系运用步 进电机带动摄像机完结变焦,因为步进点机精确地依照步进角滚动,而且由DSP进行操控,然后满足了以上机械设备无法完结地功用要求。试验结果表明,本体系 调焦曲线与抱负曲线拟合度较好,拍照已知运动轨道的方针,到达了满足作用。
1 调焦体系规划思维
在光学体系中,选用一组物镜,调理轴向位移,物镜光学体系物象联系是:
X′=f2 / X
其间 X′—— 像距(方针像平面到主焦平面的间隔);
X —— 物距(方针间隔);
f —— 光学体系焦距 f=常量,像距X′与物距X成反比联系。
运用已知的拍照调焦曲线确认步进电机滚动所需的步数和时刻坐标联系,存入F240数据存储器中,运用F240运算速度快、片载FLASH存储器大 (16K字)的特色,精确操控步进电机操控器驱动步进电机作业,经过机械设备完结拍照镜头焦距依照规则的曲线改变,然后完结实时拍照运动物体的功用。
2 硬件规划部分
2.1步进驱动器UP-4HB03M简介
UP-4HB03M是北京联太工贸有限公司出产的专用步进电机驱动器,4HBO3M适用于两相六出面混合式及四相混合式步进电机,PWM恒流操控方 式;可选择半步(四相八拍)或许16细分两种作业方式;驱动电流为0.3A接连可调,而且具有主动半流确定功用;脱机操控及其相位检测功用;一切操控信号 与功率驱动部分光电阻隔;散热外壳与驱动器内部彻底电绝缘。
2.2 TMS320F240简介
TMS320F240(以下简称F240)由DSP内核和片表里设组成。因为DSP内核具有较快的核算和呼应处理速度,能够敷衍高速运用的要 求,一起也为操控软件的规划供给了愈加有力的支撑,使操控体系能够完结愈加杂乱的功用、完结更好的操控作用。一起TMS320F240具有丰厚的片表里 设,包含16路10位A/D转换器、多个可编程的多路复用I/O引脚、硬件UART以及SPI总线等。特别是TMS320F240片内设置了一个事情办理 器(EPA),能够供给6路全比较PWM通道,能便利地完结各种PWM波形的产生。这儿运用F240主要是考虑F240速度快以及有丰厚的I/O引脚资 源;程序烧写便利,利于更新曲线坐标以及修正程序;性价比较高级要素。
2.3 硬件规划
本体系的硬件接口电路如图1所示,74ls14为反相器,接到DSP的I/O口以进步其驱动才能,CH1是一个八脚的插头,用于外接步进机的各项绕 组。步进电机以及拍照镜头部分从略。作业进程如下:首要取得拍照调焦曲线,运用MATLAB软件,得出时刻位移坐标,再换算成步进电机滚动所需的步数时刻 坐标,以数组的行式保存下来。在F240的数据存储器中拓荒空间存储步数时刻数组,运用F240定时器完结计时,I/O口输出相应宽度的脉冲信号,驱动步 进电机驱动器UP-4HB03M,其间CP为步进脉冲输入端;FREE为脱机端,高电平有用,FREE=1时,电机处于开释状况;V/D为方向操控端,高 低电平别离操控电机正回转。
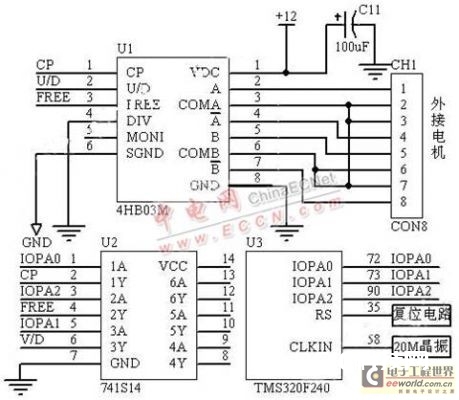
图1 硬件接口电路图