从工业自动化和机器人到电子动力转向和电机方位检测等很多职业运用都需求监督同轴或偏轴安置的旋转轴的视点。针对这种运用的任何成功的视点丈量体系规划都需求满意特定用户的要求。这些要求包含安置(偏轴或同轴)、空气空隙、精度和温度规模等等。尤其是尽量减小随温度改动的视点差错、错位和空气空隙是其中最要害的方针。
这些变量反过来关乎体系级的规划挑选,比方磁体尺度、磁体安置(同轴或偏轴)、磁体资料和机械公役。因而要求视点传感器IC具有必定的灵活性,能够习惯这些潜在的差错源,不致添加体系级规划的复杂性和本钱。即便最好的磁性视点传感器IC也好不过它检测的磁场功用。
磁性视点丈量体系有两个首要的差错来历:
●与传感器IC有关的差错:内涵固有的非线性,参数化温度漂移和噪声。
●与磁性输入有关的差错:场强改动和场强的非线性。
视点差错是指磁体的实践方位与视点传感器IC丈量得到的磁体方位之差错。这种丈量是经过读取视点传感器IC的输出并与高分辨率编码器相比较完结的。
对一次完好旋转“算计后的”视点差错被界说为视点精度差错,它是依据下列公式进行核算的:
视点精度差错=(Emax–Emin)/2
换句话说,它是与抱负直线之间的差错起伏,规模在0°和360°之间。
当在规划中运用磁体时,在整个旋转规模内的磁性输入或许不是均匀的:它具有固有差错。这些磁性输入差错将导致体系中的丈量差错,并且在考虑具有较高内涵磁性差错的侧轴或偏轴规划时这点将变得特别重要,如图1所示。
假如来自磁性输入的差错奉献值占主导地位,那么即便经过最准确校准的视点传感器IC也会发生不准确的成果。在大多数状况下,即便同轴磁性规划也会发生相对较大的错位问题,这此问题一般发生在生产线中的用户模块安装期间。这些磁性差错源是不可避免的,并且减小这些差错一般不或许做到,便是即便能够减小一点其价值也十分高。
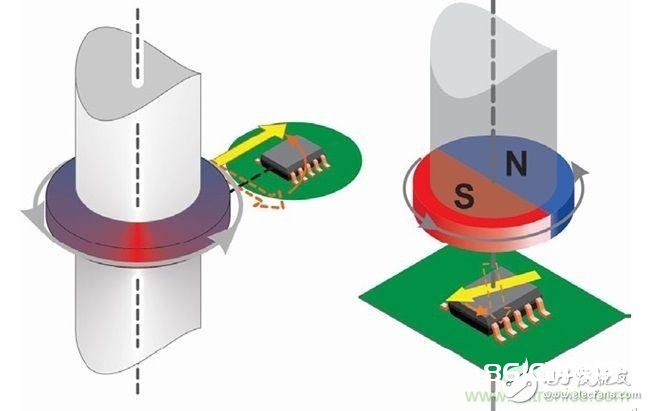
图1:用于视点传感器IC的偏轴(左)和同轴(右)装备。
至于与视点传感器IC有关的差错,制作商在向客户交给产品之前都会对非线性和参数化温度漂移进行优化,而噪声功用则能够针对客户运用运用片上滤波功用进行优化。
先进的线性化
本文介绍了一种视点传感器IC(Allegro公司的A1332)。这款传感器经过运用先进的线性化技能在客户的结尾制作方位补偿这些差错来处理这个问题。详细地讲,它展现了与磁性输入相关的±20°以上的差错怎么能够经过线性化下降至±0.3°:大约改进了65倍。
这种线性化能够依据视点传感器IC周围的方针磁体的单次旋转数据完结。从这种旋转读取的视点数据用于发生线性化系数,然后被存储进片上的EEPROM,终究为这个磁性体系优化这个特定的视点传感器IC。
在A1332视点传感器IC中用了两种不同的线性化技能:分段式线性化和谐波线性化。
这两种技能都能够经过运用Allegro公司供给的软件核算系数并编程片载EEPROM来完成。
●分段式线性化是一种可编程的功用,答应调整视点传感器IC的传输特性,以便在施加的磁场矢量视点中的线性改动能够被视点传感器IC输出为对应的线性视点增量。这种线性化是对从视点传感器IC周围的磁体一次旋转收集到的数据履行的。
对两种技能的比较测验标明,尽管分段式线性化技能能够完成更短的处理时刻,但在校对正弦差错项方面的才能很有限。在这方面,谐波线性化技能能够做的更好。别的,谐波线性化办法的灵活性——特别是改动所用校对谐波数量的才能——答运用户在运算时刻和差错功用之间获得最佳平衡。测验标明,在运用了线性化技能后,±20°的视点差错能够减小到±0.3°之内。
分段式线性化
图2显现了用分段线性化和不必分段线性化技能时的视点传感器的视点输出。为了获得这些成果,有必要创立初始的线性化系数值。用户能够在从0到360°的完好旋转规模内以1/16的距离获得15个视点样本。然后运用分段式线性化算法。图3显现了在运用分段线性化技能前后经过减去参阅编码器值后获得的视点差错,而图4是在运用分段式线性化技能后扩大检查的视点差错状况。
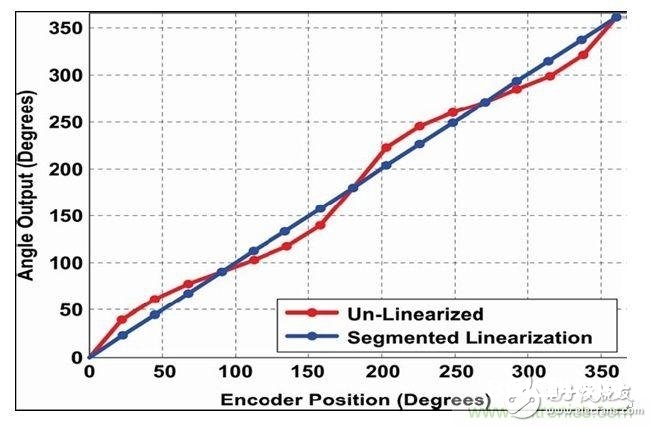
图2:运用分段式线性化技能前后的视点输出。
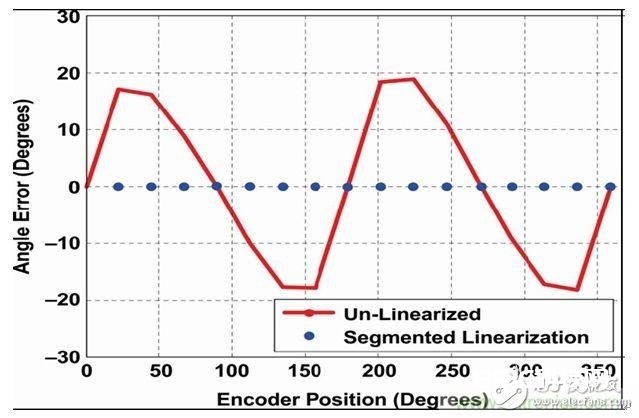
图3:运用分段式线性化技能前后的视点差错。
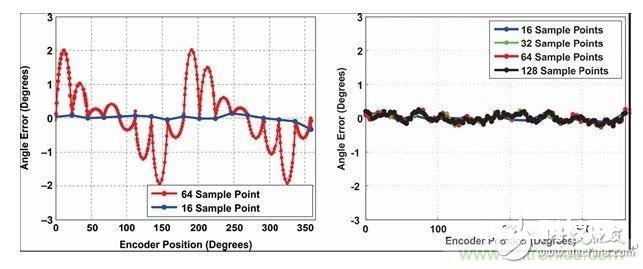
图4:运用更高采样分辨率(左)分段式线性化和(右)谐波线性化后的视点差错。
在A1332中完成的分段式线性化技能只答应16个段的线性化。经过添加段数或使段的长度可变能进一步进步这种办法的功用,因而,针对具有较高曲率的区域能够运用更精密的分段。但是,这些增强办法都会导致更长的处理时刻和更高的复杂性。
谐波线性化
谐波线性化技能用15个谐波的办法进行线性化,这些谐波的相位和起伏用快速傅里叶变换(FFT)的办法确认,而FFT的对象是在客户结尾生产线的视点传感器IC周围的磁体一次旋转收集到的数据。
谐波线性化功用具有很大的灵活性。15个谐波中的每个谐波的起伏和相位值都存储在12位的EEPROM域中,在线性化过程中需求运用的谐波数量能够由用户指定。除了支撑侧轴运用外,内置于这种线性化办法中的灵活性在去除客户结尾生产线中的静态错位差错时也十分有用。
视点推迟考虑
分段式和谐波线性化技能都十分适宜同轴和偏轴磁性运用。尽管分段式线性化将磁性规模划分为更小的部分,并对这些更小的部分以分段的办法线性化,但谐波线性化答应对差错信号进行正弦式补偿,这将有助于消除错位和侧轴安置中的高谐波差错内容。来自谐波线性化的增强功用需求支付更多运算时刻的价值:被称为“延时”的一种景象。
对许多运用来说,额定延时不是个问题。举例来说,在典型的电子动力转向(EPS)体系手轮视点传感器IC中,每隔1ms要求一个新的视点值,这意味着有满意的时刻履行乃至15个谐波的线性化,如图5。别的,许多运用会运用传感器的ORATE(可编程输出速率)功用,以便经过超采样来减小视点丈量的本底噪声。这样也能供给满意的时刻来履行线性化功用,并且不添加延时,由于额定的均匀答应有更多的时刻用于线性化操作。
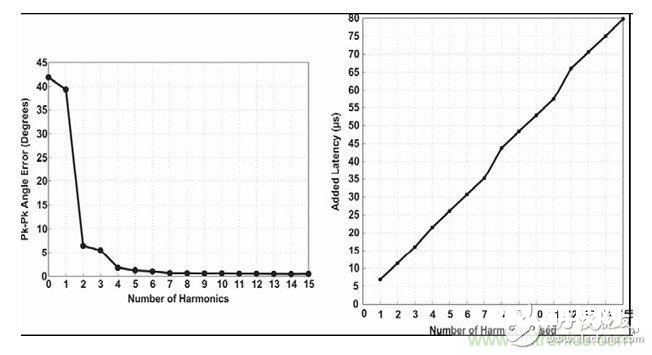
图5:线性化后的视点差错(左)和添加的视点延时(右)与所用谐波数量的联系。
XYZ错位效应
为了评价线性化后的视点传感器IC的机械性错位效应,能够履行如图6所示的映射剖析。成果显现了视点差错功用对磁体尺度的依赖性。从图中能够看到,更高的环形磁体能够更好的忍受垂直性错位,而更厚的环形磁体能够更好的忍受空气空隙的改动。

图6:错位效应:(左)X、Y和Z映射轴的界说;(右)当空气空隙=4mm时的错位功用(坚轴和横轴)。
本文小结
片上可编程且可定制的线性化功用,就像A1332视点传感器IC中完成的那样,答应体系规划师在不添加体系规划的额定复杂性和本钱的条件下,满意前面所述的精度方针。尽管分段式线性化能够获得更快的处理时刻,但受限于校对正弦差错项的才能。谐波线性化在这方面能够做的更好。别的,谐波线性化办法中的灵活性,特别是改动所用校对谐波数量的才能,答运用户在运算时刻和差错功用之间到达最佳平衡。成果是在运用线性化技能后,±20°的视点差错能够减小到±0.3°以内。
不论体系级规划师面对的是什么样的视点检测应战,适宜的磁性规划和先进的片上线性化功用组合都有助于到达抱负的功用,一起最大程度地减小由此添加的复杂性和本钱。