摘要:一些医疗检测仪器在检测时需求模仿人体温度环境以保证检测的准确性,本文以STM32为主操控器,电机驱动芯片DRV8834 为驱动器,驱动半导体致冷器(帕尔贴)给散热片加热或许制冷。但因为惯例的温度操控存在惯性温度差错的问题,无法统筹高精度和高速性的严格要求,所以选用含糊自适应PID操控办法在线实时调整PID参数,核算PID参数Kp、Ki、Kd调整操控脉冲来操控驱动器的使能。从simulink仿真的和试验成果来看含糊PID操控体系精度高、呼应速度快,能到达预期作用。
温度参数是工业出产中常用的被控方针之一,在化工出产、冶金工业、电力工程和食物加工等范畴广泛使用,在医疗检测设备中经常需求模仿人体温度进行成分检测。选用直流电机驱动芯片DRV8834驱动帕尔贴的制冷和加热进程。温度随时刻的改动率和改动的方向不确认且或许大幅度的改动,要求体系的实践温度快速和准确地盯梢设定温度以满意加工工艺的要求。时刻程序温度操控体系具有激烈的非线性、强耦合、大时滞和时变等特色,传统PID操控尽管算法简略易于完结且调整时刻较快、精度较高,可是抗干扰才能不强,简略发生振动;含糊PID不需求准确的数学模型,能较好的处理时变、非线性、滞后等问题,有很好的鲁棒性,呼应速度快。
1 进程剖析及惯例操控办法
恒温操控体系具有制冷、加热等功用,箱体内的温度传感器DS18B20经过不断地检测温度,与设置的很定温度作比较,当室内温度低于设置温度值时,加热模块作业,使DRV 8834输出正向直流,驱动帕尔贴元器材,使其加热;当温度高于设置温度值时,使DRV8834输出反向直流,驱动帕尔贴元器材,使其作业在制冷功用。使室内温度在设定值规模内震动,终究趋向于安稳。一起,操控体系将和谐操操控冷和加热体系,以到达箱温动摇值最小、高精度控温的方针。所以温度操控成为恒温操控体系的核心问题。
2 含糊PID温度操控体系的硬件电路规划
如图1,体系首要包括以下几个部分:
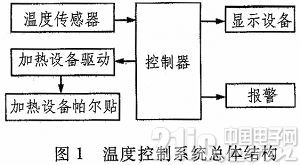
1)数字温度传感器:DS18B20是一种“一线总线”接口的温度传感器。与传统的热敏电阻等测温元件比较,它是一种新式的体积小、适用电压宽、与微处理器接口简略的数字化温度传感器,完结温度的收集。
2)操控器:选用STM32模块和存储器构成,以其丰厚的外部资源和高达72 MHz的主频完结很多的PID运算。
3)加热模块:选用驱动芯片DRV8834,是一款双路桥式步进器或许直流电机驱动器。因为加热器帕尔贴是由直流操控发热或许制冷,所以用DRV8834用作直流电机驱动器来驱动帕尔贴。
DRV8834能够驱动两个直流电机或许一个步进电机,每个H桥的电流输出为1.5 A,2.2 A峰值电流,所以用1.5 A电流驱动帕尔贴加热元器材。该器材供给了带有一个毛病输出引脚的内部关断功用,此功用用于过流维护、短路维护、欠压闭锁和过热。别的,还供给了一种低功耗睡觉形式以节省电能和添加元器材使用寿命。
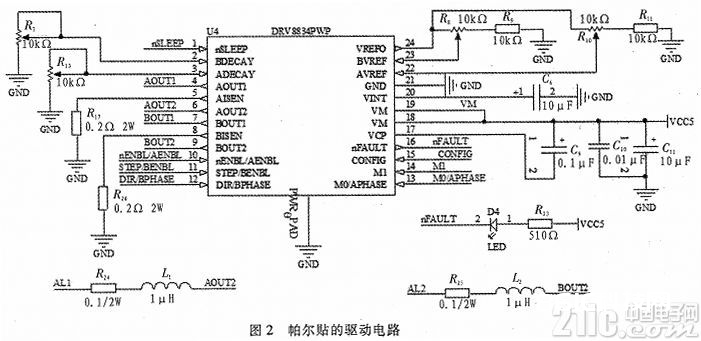
如图2,nSLEEP引脚操控驱动芯片的睡觉形式,低电平进入睡觉形式,由STM32的I/O操控;AOUT1和AOUT2为桥A的两个输出端,(这儿接帕尔贴的两个输入端),并且在AOUT端串联一个0.1欧姆的电阻和1uH的电感来模仿直流电机负载;VREFO为参阅电压的输出;AVREF和 BVREF经过滑动变阻器改动输入的电压,结合AISEN端的电阻设置斩波电流的输出,斩波电流核算公式:
![]()
AENABL引脚是DRV8834芯片的使能芯片;DIR引脚操控桥电流的输出方向,这儿能够操控帕尔贴的加热或制冷;nFAULT引脚在芯片正常作业时输出高电平,当输出低电平时表明芯片过温、过流或许欠压以指示芯片的作业状况;VM输入5 V电压供电。
3 含糊PID温度操控体系的软件规划
3. 1 含糊操控根本原理
含糊操控是以含糊调集理论、含糊言语及含糊逻辑为根底的操控,它是含糊数学在操控体系中的使用,是一种非线性智能操控。
本文在惯例PID根底上,以温度反应值与方针值的差错e和差错改动率ec作为输入,一方面送入含糊操控器用含糊推理的办法核算PID参数的调整系数,进行在线自整定,以满意不同e和ec对操控器参数的不同要求。
温度操控的软件规划首要包括3个部分:体系的初始化,含糊PID的核算,驱动电路的操控。其操控流程如图4所示。
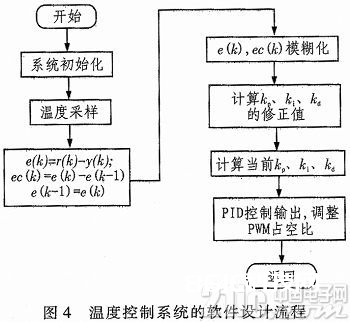
其间体系初始化包括STM32体系时钟的初始化,I/O口的初始化,数字温度传感器DS18B20的初始化,显现模块的初始化等。含糊PID的核算是 e(k)和ec(k)的值输入到含糊操控规矩表然后去含糊化算出Kp、Ki、Kd的当时值。PID操控输出的操控量是STM32定时器的计数值以操控 PWM输出的占空比,PWM输出连接到帕尔贴驱动器的使能引脚操控电流的输出的通断,然后操控帕尔贴的发热量。
3.2 含糊区分及含糊化
设温度差错e的根本论域为[-30℃,+30℃],温度差错改动率ec的根本论域为[-12,+12],输出u的根本论域为 [-0.4,+0.4],e、ec和u的言语变量E、EC和U,均区分为7个变量等级(NB,NM,NS,Z,PS,PM,PB),各个变量的含糊论域规模为:
{E)={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
{Ec}={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
{U}={-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}。
关于含糊操控器而言,温度差错及其改动率都是准确输入量,为了对确认的准确量进行含糊化,有必要把它们转换成含糊调集的从属函数。因为三角形函数核算较简略、功能较好,输入/输出变量的从属度函数都选用三角形散布。
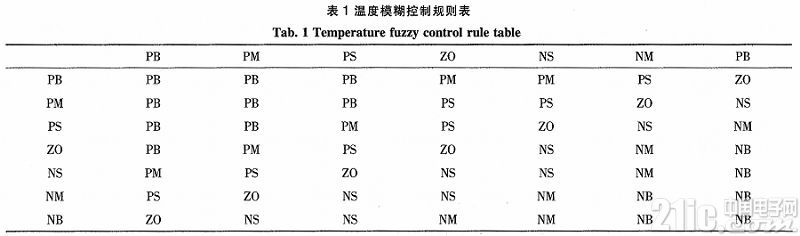
3.3 含糊操控规矩
确认含糊操控规矩的准则有必要是体系输出呼应的动、静态特性到达最佳。当差错大或较大时,挑选操控量以赶快消除差错为主;而当差错较小时,挑选操控量要注意避免超调,以体系的安稳性为首要起点。
本研讨依据实践运转经历进行了试验、剖析、概括,并得出一系列操控规矩为:
3.4 simulink的仿真比照
选用含糊自适应PID操控与惯例PID操控作比照,体现出含糊自适应在温度操控方面的优越性。帕尔贴加热散热片能够看成是一个具有时滞特性的一阶惯性环节,其传递函数为:

其间k取4,τ取500,延时部分在simulink中串联一个Transport Delay模块,延时时刻取3 s。
如图5,上半部分为含糊自适应PID操控,输入的信号经过含糊操控器算出Kp、Ki、Kd的修正值,然后加上Kp、Ki、Kd的经历值来对传递函数起作用。下面半部分就为一般的PID操控。经过虚拟的示波器调查两种操控办法的操控作用。
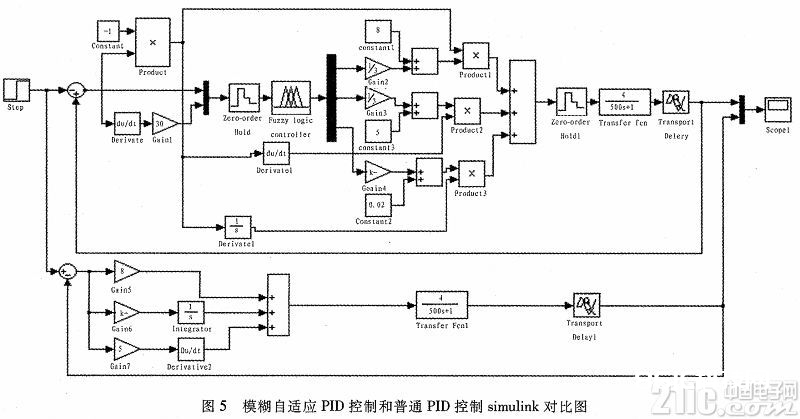
赤色曲线为一般PID操控的输出曲线,黄色曲线为含糊自适应PID操控的输出曲线,经过比照能够发现,传统的PID操控存在严峻的超调,并在预期值上下震动,调整时刻长。含糊自适应PID操控很好的处理了这个问题,以最快的时刻最小的超调到达体系安稳。
4 结束语
本次试验选用了常用的直流电机驱动器经过恰当调整电路运用到半导体制冷器材上,电路简略本钱也较低。软件规划上运用PID含糊操控有用的处理了温度操控的惯性和推迟问题,试验根据STM32操控器充分利用其固件库函数大大减少了开发周期,提高了功率。此体系能够运用在医疗设备、家用小电器等一些用到温度操控的场合中,具有必定代表性。
- STM32单片机中文官网
- STM32单片机官方开发工具
- STM32单片机参阅规划