


网上的矩阵键盘代码十分十分多,但绝大部分都是要接连I/O口的,就比方PA0-PA7、PB3-PB10等等等,这些都要用到一排的接连的单片机引脚。用过STM32单片机的都知道,STM32单片机一排曩昔接连的引脚的不是许多,就算刚好呈现了一排PA0-PA10,但是呢,PA2、PA3串口2要用,PA9、PA10串口1要用,这就显得比较限制。并且市面上的那些许多都是修正引脚要全文上下一处处修正,费事且简略讹夺。所以假如我矩阵键盘的引脚能够随意界说的话那么是不是就不必愁这个问题了? 所以,这便是我给咱们带来的恣意可用的I/O的矩阵键盘程序,按键扫描代码直接操作IO口,得出按键值。用法很简略:先看下图
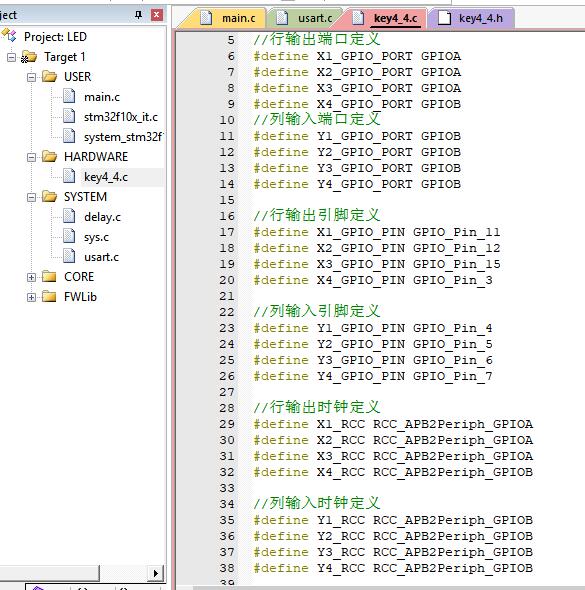
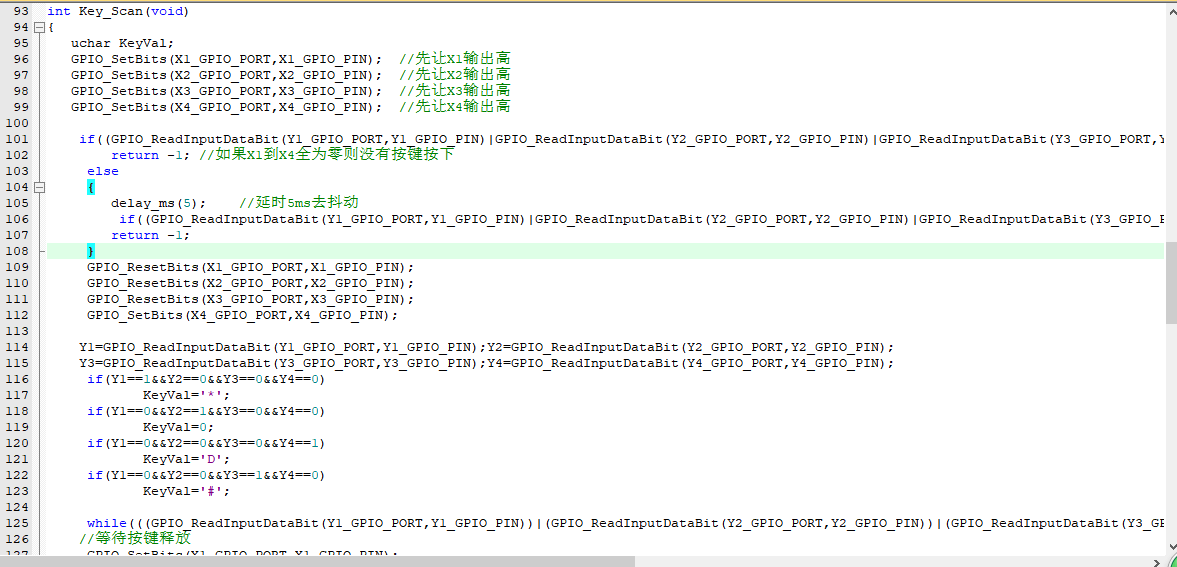
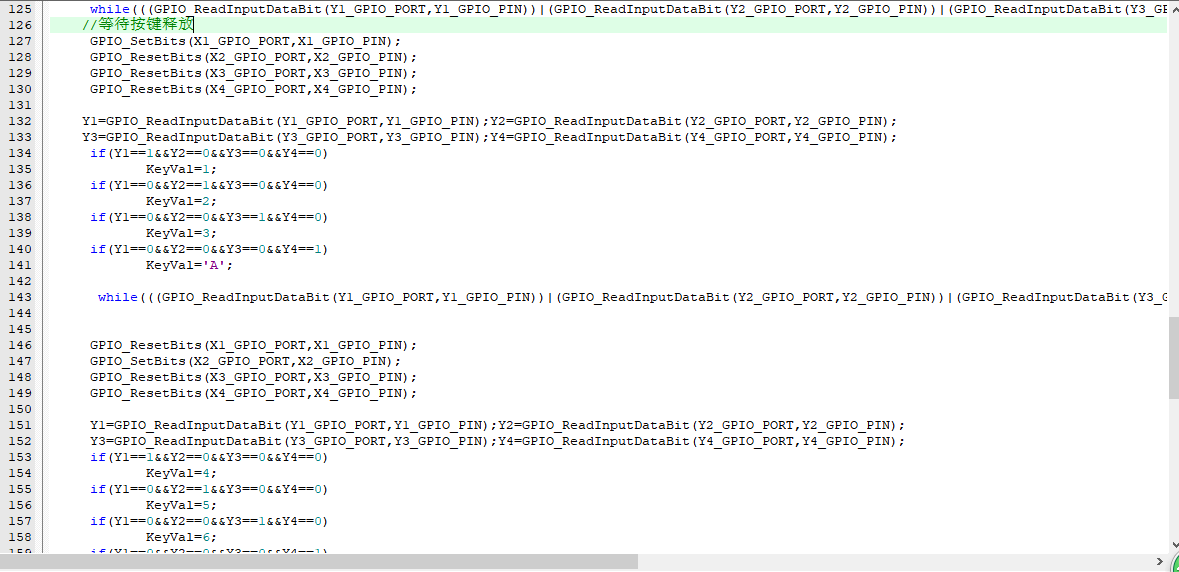
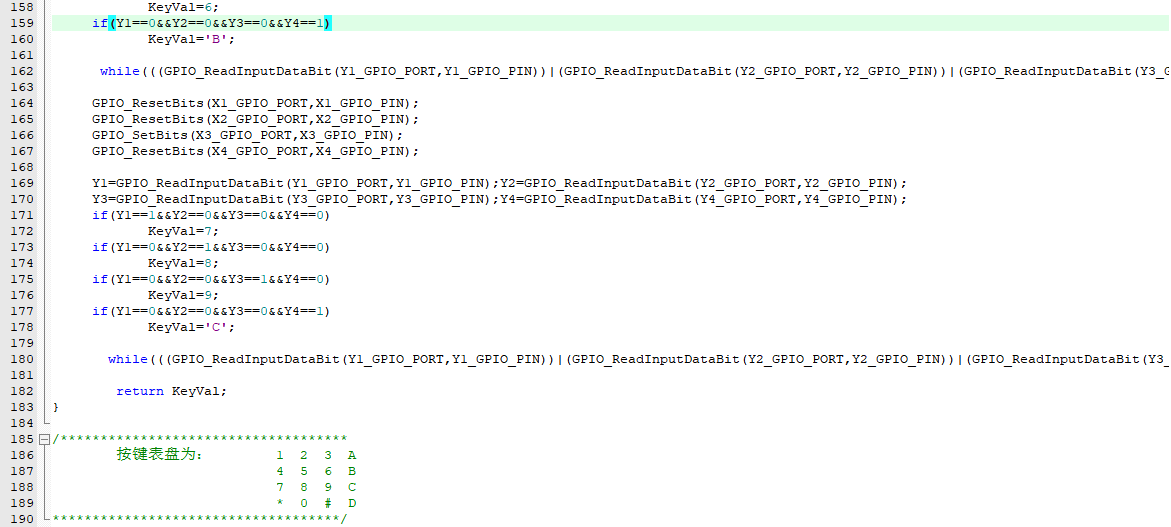
咱们看到,在key4_4.c中现已用宏界说界说好了矩阵键盘8个引脚的端口、详细引脚和时钟,便利程序的移植和修正。所以这个程序的用法十分简略,且移植性十分十分地高,由于运用者只需要在宏界说中依据实际需要和兴趣爱好修正那8个引脚的端口、详细引脚和时钟就行了,剩余的就不必修正了,且移植到其他程序去就能够直接运用。下面是按键扫描函数,用库函数给IO口设置凹凸电平,再依据这些引脚电平状况得出按键值,详细请看截图:(//Author:GXNU_LPK_201512700***(广西师范大学电子工程学院2015_LPK)注:此部分按键扫描代码是我熬夜探索测验调试出来的,期望不要被认作抄袭或仿制,尽管网上可能有相同的)
当界说存储按键值的变量keyscan类型为unsigned char时,没有按键按下时默认值为255,即keyscan=255,其他类型的默认值能够自己测验。所以能够这么用:
-
keyscan = Key_Scan();//keyscan为unsigned char 型
-
if(keyscan != 255)
-
{
-
key_value = keyscan;
-
}
下面是测验成果截图:
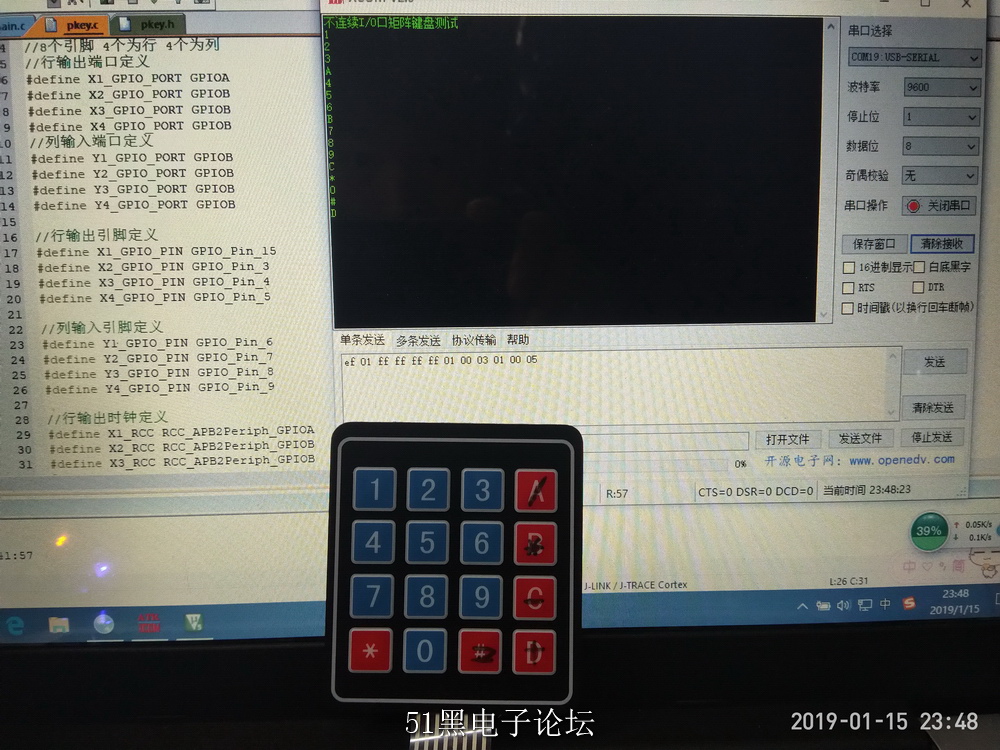
下图是我的硬件渠道,用的是STM32F103C8T6最小体系板子
代码用C言语编写,现已验证经过,请放心运用,只需修正好了引脚相关信息和不接错接反线都能正常运用的。特别强调的是,移植时你界说的矩阵键盘引脚不能和其他程序或板子设置的硬件抵触,否则可能会呈现按键无效或部分按键无效的状况。还有,假如你测验时发现按键值不对应,这是由于你矩阵键盘的PCB布线跟我用的这个不同,自己在程序按键值里边手动修正就好了。
下面是main.c代码
//main.c
#include "key4_4.h"
#include "delay.h"
#include "sys.h"
//渠道:STM32F103
//试验称号:不接连I/O矩阵键盘试验
//Author:GXNU_LPK_201512700***(广西师范大学电子工程学院2015_LPK)
//运用阐明:矩阵键盘所用引脚都现已用宏界说界说好了,移植只需依据实际需要在key4_4.c中修正对应的时钟、引脚和端口即可,其他都不必修正。
//矩阵键盘所用的8个引脚可接连可不接连,看实际需要和个人爱好自己界说。
int main(void)
{
uart_init(9600);
Key_Init();
delay_init();
printf("不接连I/O口矩阵键盘测验rn");
while(1)
{
Key_Test();
}
}
仿制代码
下面是usart.c代码
#include "sys.h"
#include "usart.h"
//////////////////////////////////////////////////////////////////////////////////
//假如运用ucos,则包含下面的头文件即可.
#if SYSTEM_SUPPORT_UCOS
#include "includes.h" //ucos 运用
#endif
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习运用,未经作者答应,不得用于其它任何用处
//ALIENTEK STM32开发板
//串口1初始化
//正点原子@ALIENTEK
//修正日期:2012/8/18
//版别:V1.5
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2009-2019
//All rights reserved
/
//串口1中止服务程序
//留意,读取USARTx->SR能防止不可思议的过错
u8 USART_RX_BUF[USART_REC_LEN]; //接纳缓冲,最大USART_REC_LEN个字节.
//接纳状况
//bit15, 接纳完结标志
//bit14, 接纳到0x0d
//bit13~0, 接纳到的有效字节数目
u16 USART_RX_STA=0; //接纳状况符号
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
USART_DeInit(USART1); //复位串口1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
//Usart1 NVIC 装备
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //依据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个中止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流操控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发形式
USART_Init(USART1, &USART_InitS
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//敞开中止
USART_Cmd(USART1, ENABLE); //使能串口
}
#if EN_USART1_RX //假如使能了接纳
void USART1_IRQHandler(void) //串口1中止服务程序
{
u8 Res;
#ifdef OS_TICKS_PER_SEC //假如时钟节拍数界说了,阐明要运用ucosII了.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接纳中止(接纳到的数据有必要是0x0d 0x0a结束)
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接纳到的数据
if((USART_RX_STA&0x8000)==0)//接纳未完结
{
if(USART_RX_STA&0x4000)//接纳到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接纳过错,重新开始
else USART_RX_STA|=0x8000; //接纳完结了
}
else //还没收到0x0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0x3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接纳数据过错,重新开始接纳
}
}
}
}
#ifdef OS_TICKS_PER_SEC //假如时钟节拍数界说了,阐明要运用ucosII了.
OSIntExit();
#endif
}
#endif






