怎样才能把多个 CPU 内核、硬件加速器块以及 10G 以太网接口结合起来操控一个电机呢?关于选用 1 美元微操控器 (MCU) 来运转电机的规划人员而言,这一问题太荒唐了。答案或许来自令人感兴趣的操控体系规划事例,实时体系体系结构的开展等。
起点
让咱们介绍一种在咱们运用场景中处于中心方位的永磁同步电机,即 PMSM。PMSM 有很多种外形和体积,适宜很多种运用,从开关门到机器人手术东西关节等。在这一领域中,它得到了广泛的运用,这是因为其固有的可靠性、低成本,在咱们的运用中,经过恰当的操控,能够完结高精度和高功率。实践上,运用的要求越来越高,PMSM 支撑您下降机电规划的杂乱性,在软件中完结杂乱的功用。
PMSM 机械和电气特性十分简略 (图 1) 。转子正如其称号所示,是永磁体。一般有三个定子绕组,在电机中均匀的 120 度角散布。真实的窍门在于绕组的不同:滚动密度是环绕定子呈正弦散布,因而,绕组实践上在边际上彼此堆叠。在绕组适宜的相位上运用正弦电流,您能够树立与转子场视点笔直的旋转磁场,从而在转子上高效的发生扭矩。
操控 PMSM 并不是高科技。一个简略的 MCU 运用查找表和插值来生成所需的驱动电流时变正弦信号,为绕组供给电流。假如算法正确,绕组会发生电机旋转磁场,转子随之滚动。尽管起步有些杂乱,但毕竟完结任务了,对吧?不完满是这样。
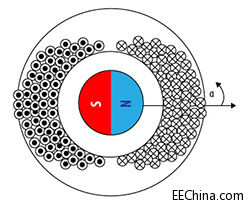
图 1. PMSM 截面
现场定位操控
开环操控的问题总是很杂乱。发动电机,特别是有负载的状况,会比较难,功率也不高。开环操控器的呼应并不能很好的习惯负载扭矩或许速度指令的改变,无法按捺振荡。出于一般的考虑,反应操控体系作业起来会更好一些。
问题是要操控什么。很明显,我期望操控滚动视点 — 在某些运用中,旋转速度。咱们有必要经过操控发生旋转磁场的三个绕组电流来完结这一作业。对此最好的办法是,在业界现已运用的多路步进,即,线程定位操控 (FOC) (图 2) 。
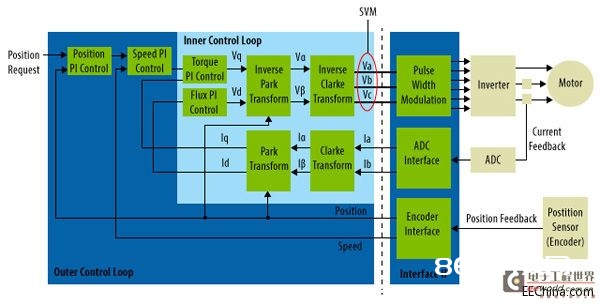
图 2. 驱动结构图
榜首,咱们收集来自转轴编码器的转子方位采样,以及三个绕组中两个绕组的电流采样。因为一些很好的数学算法,咱们并不需要一切三个绕组电流。这些采样告知咱们转子以及定子旋转磁场的瞬时方位和滞后速度。咱们的作业是操控转子的速度和方位,这经过操控定子绕组的电流巨细来完结,一起还要让旋转磁场比转子磁场超前 90 度。
经过两个简略的改换,咱们很简略完结这一作业。Clarke 改换将两个定子绕组的电流采样 — 它们分隔 120 度,映射到一对正交矢量上。矢量的方向相关于定子是固定的,当然,其矢量和是旋转磁场矢量。Clarke 改换只需要将电流值乘以常数,加上乘积 — 简略的乘累加运算。
第二种改换是 Park 改换,将这两个正交矢量映射到转子参阅的旋转帧中。一个矢量与转子磁场对齐,另一个 — 正交矢量,视点与其笔直。Park 改换比较难处理。在进行矢量乘法把矢量改换成转子参阅帧之前,它运用瞬时转轴方位来核算 sin(θ) 和 cos(θ) 系数。
现在,咱们能够操控信号。咱们把与转子对齐的矢量坚持为 0,表明定子磁通量没有对转子发生扭矩。咱们运用正交重量来操控转子方位和速度,定子磁通量实践上发生了扭矩。
例如,操控器会处理所需方位的输入,将其与传统分立时刻份额积分 (PI) 操控电流的实践转轴视点相比照,发生差错信号,输出至 FOC 模块。FOC 模块然后会把这一差错信号送入正交扭矩信号中,使转子旋转。模块会运用 Park 反改换,把扭矩映射回定子参阅的固定帧,然后,经过 Clarke反 改换,把扭矩信号映射到电流中,送入三个绕组。这样就改变了定子绕组所需方位和所需速度输入鼓励信号,旋转定子磁场,使转子处于所需的视点上。