导言
本文是依据第三届全国大学生“飞思卡尔”杯智能轿车大赛要求规划自主辨认路途的智能车。整个体系选用了组委会供给的16位单片机mc9s12dg128为中心,模型车自身带有差速器和后轮驱动,需求规划完结根据单片机的自动操控体系使得模型车在关闭的跑道上自主循线运转。
车模与操控器构成一个自动操控体系,如图1,体系硬件以单片机为中心,配有传感器、执行机构以及它们的驱动电路,而信息处理与操控算法由单片机软件完结[1]。体系规划要求单片机把途径的敏捷判别、相应的转向伺服电机操控以及直流驱动电机的操控精细的结合在一起。

智能车的规划是在确保模型车牢靠运转的前提下,以电路规划简练、车体灵活性高为准则。规划的两大要点,一是光电传感器的布局和电路规划,一是循线操控算法的规划。
本文第二节首要介绍了光电传感器的电路规划和布局,这是信号收集的要害,相当于智能车的“眼睛”;第三节首要介绍了循线操控算法,这是操控的中心,相当于智能车的“脑筋”;终究在第四节对智能车的硬件、软件规划及试验状况进行了大体阐明。
光电传感器
光电传感器的挑选及电路规划
光电传感器坐落智能车的最前方,起到预先判别途径的作用。其发射的光对白色和黑色有不同的反射率,因而能得到不同的电压值,采进单片机后经过必定的算法比较电压来判别黑线的方位,然后操控舵机的滚动[2]。这种办法易于完成,呼应速度快,实时性好,成本低。
本文选用性价比根本合适的反射式红外传感器tcrt5000。红外光电传感器电路的规划方法多种多样,因为本文算法中选用的是传感器阵列经历判别办法,为了操控简洁选用数字量输出传感器电路,如图2所示。
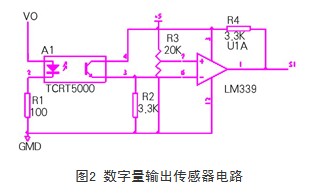
光电管选用脉冲调制式发光,即vo是震动电路发生的脉冲电压,这样易滤除外界搅扰。尽管电路相对杂乱,但足以确保模型车的安稳行进[3]。
光电传感器布局的研讨
光电管阵列的布局直接影响智能车的循线作用。一般来说,典型的布局有“一”字形布局和“w”形布局两种。
所谓“一”字形布局,便是把多个传感器依照“一”字排开。这种传感器布局方法最常见,算法在理论上易于完成。其不足之处在于:对赛道的曲率几乎没有任何猜测功用。因而一般不选用这种布局。
而“w”形布局,是把多个传感器依照“w”形摆放。“w”形布局因为传感器散布在两排,使得智能车对弯道有必定的猜测功用,这种猜测功用特别体现在直道进入弯道时间。后一排传感器仍在直道时,前一排传感器现已进入弯道。而不足之处是添加了操控算法的杂乱程度,判别舵机的旋转方向时,往往需求上一次的检测数据。经历判别的可能性也跟着传感器数量的添加而添加。
光电传感器布局仿真
经屡次仿真试验,终究确认了传感器的布局和数量。选用如图3所示的“w”形布局,一共有13个传感器,前排8个,后排5个,前后两排距离为3.5cm。设置这个距离,使其对赛道有必定猜测功用。详细的布局及仿真作用如图4所示。