


摘要 因为存在一个冗余横倾轴,三轴光电盯梢体系可以处理两轴光电盯梢体系的盯梢盲区问题,完结针对方针的全空间盯梢。针对车载三轴光电盯梢体系,在剖析体系运动学特性的基础上,建立了体系的运动学模型,并提出一种依据混合优化算法的车载三轴联动全空间光电盯梢战略。经过对体系运动学模型的研讨,剖析三轴滚动视点之间的联系,然后将三轴转角增量组合的三变量优化问题简化为求解单变量最优问题,然后运用混合优化算法得到最优的三轴角增量组合。仿真和试验成果证明,所规划的三轴盯梢战略可以得到更小的三轴滚动角增量组合,可以完结车载三轴光电盯梢体系的三轴联动全空间接连盯梢运动,进步了体系的盯梢功用,具有杰出的实践运用价值。
光电盯梢体系因为具有较高的时频域分辨率,杰出的抗电磁干扰才能,优胜的夜间调查功用和环境适应性,因而在低可观测性方针勘探、高分辨率方针辨认等范畴具有较大的潜力。现在,光电盯梢体系在准确制导、火控和瞄准等军事运用范畴均具有广泛运用,遭到遍及重视。一起,跟着对光电盯梢体系要求的不断进步,特别是光电盯梢体系本身机动性的要求,基座固定于大地的光电盯梢体系已不能满意运用要求。因而,开展运动渠道光电盯梢体系成为当时研讨的内容。
两轴光电盯梢体系不可防止地存在盯梢盲区。三轴光电盯梢体系因为存在一个冗余的自由度,可以防止两轴光电盯梢体系的盯梢盲区问题,完结全空间无盲区盯梢。可是,体系中冗余自由度的存在使得三轴光电盯梢体系的测量值与空间方位呈现多对一的特性,然后决议了盯梢战略的多样性和复杂性。现有的三轴盯梢战略大多是依托切换办法,其实质是两种不同的两轴盯梢战略组合,体系尽管是三轴结构,可是未能完结三轴联动盯梢,并且切换进程会不可防止地增大体系盯梢差错,然后下降体系的盯梢精度和可靠性。
现在也有运用优化办法规划的三轴盯梢战略。文献给出了一种依据粒子群算法的三轴盯梢战略,可是,其间的部分盯梢成果与俯仰-横倾式两轴盯梢体系相同,未真实地完结三轴联动盯梢;一起,单纯运用粒子群算法存在早熟收敛,后期迭代功率低一级缺陷。因而,其优化盯梢战略寻优时刻长,实用性较低。
依据以上原因,本文规划了一种车载三轴光电盯梢体系。一起,在剖析体系运动学特性的基础上,提出一种快速混合优化算法,将此优化算法运用于三轴联动盯梢战略的研讨中,求得方针在不同方位时满意盯梢要求的三轴角增量组合,并经过仿真试验验证此盯梢战略的有效性和实用性。
1 车载三轴光电盯梢体系运动学特性剖析
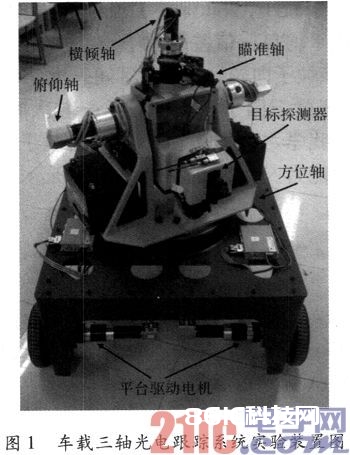
图1为自主规划的车载三轴光电盯梢体系试验设备图。体系的作业原理为:三轴光电盯梢体系设备于沿水平面运动的车载运动渠道,空间方针的方位由方针勘探器(CCD)测得;然后经过方位轴、俯仰轴和横倾轴的滚动,使得瞄准轴对准方针,以完结体系的盯梢功用。
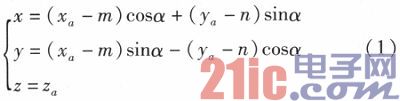
三轴光电盯梢体系各滚动轴的滚动方位如图2所示。以大地坐标系为参阅坐标系,原点为Oa,车载渠道所在方位为O。在某当时时刻,车载渠道的当时平移坐标在原坐标方位为(m,n,0),滚动视点为α。设方针原始坐标为(xa,ya,za),则原始坐标(xa,ya,za)和当时车载渠道坐标(x,y,z)的转化联系为
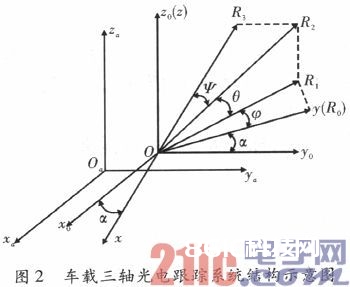
初始状况时,体系方位轴和横倾轴与z轴重合,俯仰轴与x轴重合,瞄准轴与y轴重合。设方针与O的间隔为yd,依据四元数界说,三轴光电盯梢体系在参阅坐标系下的零位瞄准轴矢量为R0=ydj。首要绕方位轴滚动视点为φ,得到瞄准轴矢量R1,描绘滚动的四元数为q1;再绕俯仰轴滚动视点为θ,得到瞄准轴矢量R2,描绘滚动的四元数为q2;终究绕横倾轴滚动视点为ψ,得到瞄准轴矢量R3,描绘滚动的四元数为q3,其间

关于三轴光电盯梢体系,经过方针勘探器可获得方针原始方位ra(xa,ya,za),并经过式(1)转化为当时方位r(x,y,z),而体系的三轴初始转角(φ,θ,ψ)为可测值。因而,为使三轴光电盯梢体系瞄准方针当时方位r,三轴光电盯梢体系的三轴履行角可由3个角方位增量(△φ,△θ,△ψ)完结,其联系如式(4)所示。

经过剖析可看出,式(4)为冗余方程。因而,在三轴光电盯梢体系中,因为冗余横倾轴的存在,当滚动前后的指向方位和方针方位已知时,三轴角增量的滚动视点组合可有无数个,因而有必要选用优化办法以求解最佳的三轴转角增量组合。
因为三轴光电盯梢体系的终究方针是使体系瞄准轴对准盯梢方针,为使三轴光电盯梢体系可以在最短时刻内盯梢方针,将其优化方针设定为
minJ0=|△φ|+|△θ|+|△ψ| (5)
求取三轴角方位增量(△φ,△θ,△ψ)的进程实质是三变量优化问题。因为式(4)为冗余方程,因而依据式(4),可用角增量△θ将其他两个角增量△φ和△ψ表明出来,别离如式(6)和式(7)所示。

式(7)中
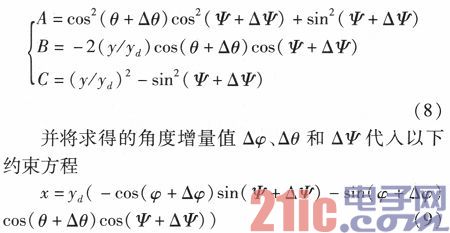
将不满意式(9)的视点增量值舍去,并代入式(5),得到满意要求的三轴角增量组合。
在满意对准方针的前提下,结合式(6)、式(7)和式(9),将式(5)所示的优化方针转化为由△θ表明的函数
minJ(△θ)=|△φ(△θ)|+|△θ|+|△ψ(△θ)| (10)
经过以上办法,将三变量优化问题简化为单变量优化问题,可以简化算法的优化进程,缩短算法的优化进程,进步优化算法的快速性。
2 依据混合优化的车载三轴联动盯梢战略
2.1 混合优化算法
PSO算法是一种依据迭代的智能优化东西,其算法收敛快、鲁棒性好、通用性强,特别合适工程运用。可是,PSO算法存在早熟收敛,并且后期迭代功率不高。因而,针对PSO算法的以上缺陷,对PSO算法进行自适应改善,并引进遗传算法中的穿插和变异思维,提出一种混合优化算法,以进步算法的大局查找才能,防止早熟收敛,改善算法的优化功用。
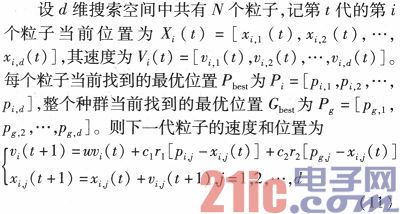
其间,w为惯性权因子;c1和c2为正的学习因子;r1和r2为[0,1]之间均匀分布的随机数。
算法的改善描绘如下:
(1)经过对惯性权因子w的非线性递减,以改善算法的收敛功用,其表达式如下
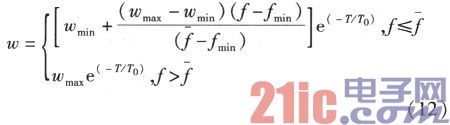
其间,wmax和wmin别离为w的最大值和最小值;f为粒子当时的方针值; 和fmin别离为当时一切粒子的均匀方针值和最优方针值,T为当时迭代次数,T0为总迭代次数。
和fmin别离为当时一切粒子的均匀方针值和最优方针值,T为当时迭代次数,T0为总迭代次数。
经过式(12)可看出,惯性权因子w跟着迭代次数的添加而削减,因而,算法前期查找规模大,大局查找才能强,算法后期迭代功率高,收敛速度快。并且,当各粒子的方针值趋于共同或许趋于部分最优时,使得惯性权重添加,加大了查找规模,进步了大局查找才能;当各粒子方针值比较涣散时,使得惯性权重减小。一起关于方针的方针值优于均匀方针值的粒子,对应的惯性权因子较小,然后维护了该粒子;反之,关于方针方针值比均匀方针值差的粒子,对应的惯性权因子较大,使得该粒子向较好的查找区间挨近。
(2)关于学习因子c1和c2,当c1较大时,粒子具有较大的自我学习才能;当c2较大时,粒子具有较大的社会学习才能。因而,其表达式如下所示
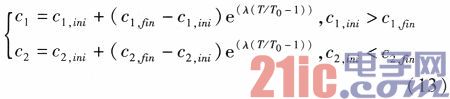
其间,c1,ini和c2,ini别离为c1和c2的初始值;c1,fin和c2,fin别离为c1和c2的迭代终值;T为当时迭代次数;T0为总迭代次数;λ为给定参数。
经过式(13)可以看出,在优化初期,粒子具有较大的自我学习才能和较小的社会学习才能,加强了大局查找才能;在优化后期,粒子具有较小的自我学习才能和较大的社会学习才能,有利于收敛到大局最优解。
(3)对方针值优于均匀方针值的粒子坚持不变,以维护优异粒子;一起,关于方针值劣于均匀方针值的粒子,履行穿插和变异操作,其具体进程如下。
穿插:关于方针值劣于均匀方针值的粒子,将其与大局最优粒子Gbest穿插,取子代方针值最优的粒子替代当时粒子。其穿插概率为

其间,f为粒子当时的方针值;和fmax别离为当时一切粒子的均匀方针值和最差方针值;Pcmax和Pcmin别离为穿插概率的上下限;μ为设定常数。
变异:关于方针值劣于均匀方针值的粒子,进行变异操作。其变异概率为
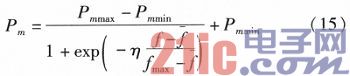
其间,f为粒子当时的方针值;f和fmax别离为当时一切粒子的均匀方针值和最差方针值;Pmmax和Pmmin别离为变异概率的上下限;η为设定常数。
从式(14)、式(15)两式可以看出,粒子的方针值越差,其穿插概率和变异概率越大。因而,经过以上穿插和变异操作,不光可以进步种群的多样性,加速算法的收敛速度,并且可以防止早熟收敛,进步算法的大局查找才能。
2.2 三轴混合优化战略
将混合优化算法运用于求解式(10)三轴角增量组合的优化问题中,算法流程如下。
Step1随机初始化粒子△θ的方位与速度,核算不同△θ所对应的不同J值,将粒子△θ的Pbest设置为当时方位,Gbest设置为初始集体中最小J值所对应的△θ值。
Step2关于一切粒子△θ,履行操作:(1)依据式(11)~式(13)更新粒子的方位与速度。(2)核算各粒子△θ对应的方针值J,更新个别最优方位Pbest和集体最优方位Gbest。
Step3对方针值优于均匀方针值的粒子坚持不变;关于方针值劣于均匀方针值的粒子,履行穿插和变异操作:(1)依据式(14)将其与大局最优粒子Gbest穿插,取子代方针值最优的粒子替代当时粒子。(2)依据式(15)进行变异操作。(3)核算各粒子△θ对应的方针值J,更新个别最优方位Pbest和集体最优方位Gbest。
Step4判别算法收敛原则是否满意式(10),若满意,履行Step5;不然,转向Step2。
Step5输出大局最优方位Gbest和所对应minJ,算法运转完毕。
3 试验数据和剖析
在盯梢精度必定的条件下,光电盯梢体系的盯梢功用主要由两方面决议:(1)盯梢规模的巨细。盯梢规模越大,体系的盯梢功用越好。(2)各轴滚动角增量的巨细。在各轴滚动速度相同的条件下,滚动角增量越小,完结方针盯梢所需求的时刻越短,体系的盯梢快速性越好,体系的盯梢功用也更为优胜。
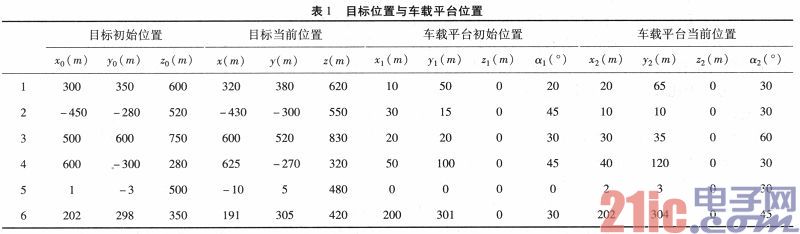
首要,为查验依据混合优化算法的车载三轴盯梢战略优化功用,针对表1中方针方位和车载渠道方位,运用混合优化算法对三轴角增量组合进行100次寻优,经过对其寻优迭代次数的多少对算法的快速性进行验证。这儿只给出针对表1中第1组所得的寻优迭代次数和均匀优化成果。其间,混合优化算法的参数设置如下

图3(a)为100次寻优的三轴角增量和的均匀迭代曲线,图3(b)为100次寻优的不同迭代次数。如图3所示,运用混合优化盯梢战略,经过将三轴角增量寻优问题转化为一维单变量寻优问题,均匀只需求

因而寻优进程简洁,寻优时刻短,算法的快速性杰出。
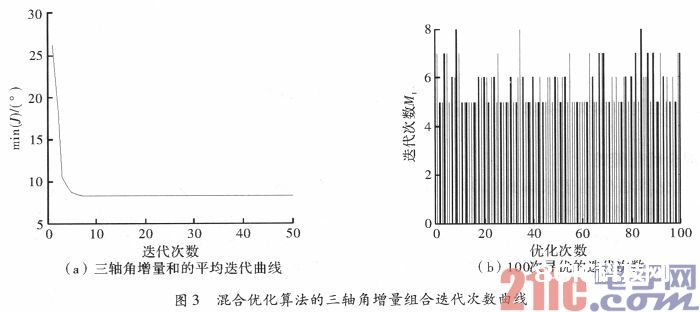
表2给出了依据混合优化的车载三轴盯梢战略盯梢成果和相应的车载两轴战略的盯梢成果。从表2两种盯梢成果的比较中,可得出以下定论:

(1)车载两轴光电盯梢体系在天顶邻近(第5和6组数据)的方位角增量显着过大,无法完结方针的盯梢,体系进入盯梢盲区。因而车载两轴光电盯梢体系的盯梢规模最小。
(2)运用混合优化盯梢战略的车载三轴光电盯梢体系,不光在天顶邻近可以以较小的滚动角增量来完结方针的盯梢,然后防止天顶盲区的发生;并且,与两轴盯梢战略相比较,依据混合优化盯梢战略的车载三轴光电盯梢体系,其滚动角增量的最大值|△|max最小,因而可得到更小的角增量组合,体系盯梢进程所需的时刻更短,可以更快地完结方针的盯梢定位,盯梢功用最好。
为验证依据混合优化的车载三轴光电盯梢战略的有效性,考虑车载三轴光电盯梢体系的接连盯梢运动。车载三轴光电盯梢体系试验设备如图1所示,由试验设备的相关参数可知,体系各轴的最大转速为v=57.3°/s;方针勘探器的采样频率为10 Hz,三轴转角采样频率为50 Hz。为便于比较,考虑当方针过顶时的盯梢轨道。设在初始时刻光电盯梢体系的瞄准轴正对方针,方针由[3 000,-1 800,600]T经T0=12 s匀速直线运动至[-360,600,1 800]T,车载渠道由[100,100,0]T经T0=12 s匀速直线运动至[220,220,0]T,转角由20°匀速转至30°。可看出,当t=10 s时,方针方位为[200,200,1600]T,车载渠道方位为[200,200,0]T,此刻方针经过车载渠道的天顶方位。
为防止寻优进程中偶尔呈现的迭代次数过大,防止寻优时刻过长,依据实践测验的经历将每次寻优的最大迭代次数设定为15;当寻优进程中迭代次数>15时,中止迭代,并选出当时的最优角增量组合作为终究优化成果。
经过剖析可知,关于车载两轴光电盯梢体系,当方针抵达车载渠道天顶方位时(t=10 s),其方位角滚动速度为无穷大,其驱动电机的功率无法满意体系盯梢的要求,形成方针丢掉,体系进入盯梢盲区。而运用切换战略的车载三轴光电盯梢体系,尽管可以经过方位轴和横倾轴的运动切换防止天顶盲区;可是,切换进程使得体系盯梢进程不接连,不光添加了体系运动操控战略的复杂性,且为确保在运动切换进程中仍可盯梢到方针,在天顶邻近需求方位轴转速马上为0,一起横倾轴马上由停止到达希望转速。明显,这在实践的体系中是无法完结的,因而不可防止地会增大体系在切换进程中的盯梢差错,下降体系的盯梢精度和可靠性,乃至导致体系在切换进程中丢掉方针。
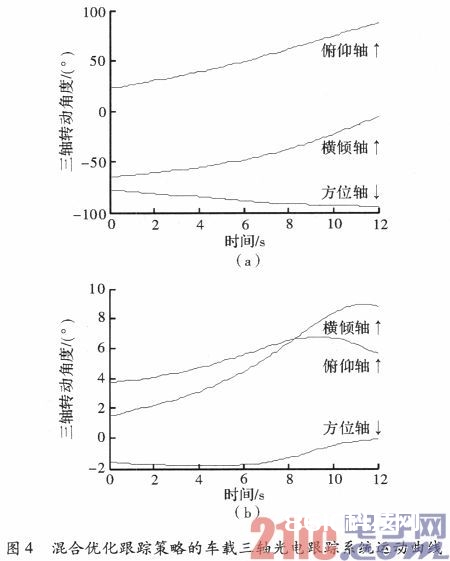
图4为依据混合优化盯梢战略的车载三轴光电盯梢体系的盯梢运动曲线。从图4中可以看出,依据混合优化盯梢战略的车载三轴光电盯梢体系,在整个盯梢运动进程中,体系所需的三轴滚动速度均远小于体系给定的最大转速,因而使得三轴可以别离滚动一个比较小的视点就可以完结对方针的盯梢定位,确保了体系盯梢进程中的实时性和快速性;并且,体系可以防止盯梢盲区的发生,完结方针的全空间接连盯梢定位,其盯梢功用优于两轴盯梢战略;一起,在盯梢进程中不需求进行轴系间的运动切换,防止了因为切换所引起的盯梢进程不接连,以及切换进程中发生的盯梢差错增大、体系的盯梢精度和可靠性下降等问题,因而其盯梢功用也优于三轴切换盯梢战略。所以体系在整个操控运动进程中的盯梢差错小,盯梢精度高,盯梢稳定性杰出,可以满意车载三轴光电盯梢体系关于方针盯梢的要求。因而,依据混合优化盯梢战略的车载三轴光电盯梢体系,可以真实完结三轴联动全空间接连盯梢运动,具有杰出的盯梢功用。
4 完毕语
本文运用四元数办法剖析车载三轴光电盯梢体系的运动学特性,给出三轴转角与方针方位坐标之间的联系。然后,提出一种混合优化算法,并运用于三轴联动全空间接连盯梢战略的研讨中,得到在不同方针方位下满意盯梢要求的最优三轴角增量组合。仿真和试验成果表明,运用混合优化盯梢战略的车载三轴光电盯梢体系,可以消除盯梢盲区,完结方针的全空间盯梢运动;并且,体系在盯梢进程中不需求进行轴系间的运动切换,完结了方针的接连盯梢运动,下降了体系运动操控战略的复杂度,防止了因为切换进程所带来的盯梢差错增大和盯梢精度下降问题;一起,在盯梢进程中体系可以以更小的滚动轴角增量完结方针的盯梢运动,因而可以在更短的时刻内完结方针的盯梢定位。因而,运用混合优化盯梢战略,可以真实完结车载三轴光电盯梢体系的三轴联动全空间接连盯梢运动,并且进步了体系的盯梢功用,其盯梢功用优于现有的两轴和三轴切换盯梢战略,具有杰出的工程实用性。






