


一、项目概述
1.1 导言
跟着现代工业的开展,噪声污染已成为一个世界性的问题。长期以来,人们不断寻觅噪声操控的有用办法。在传统噪声操控中,首要选用吸声材料、阻尼处理、结构消声等无源消声办法,这种办法尽管能够很好的消除高频噪声,可是对波长较长的低频噪声是不适用的,尽管低频噪声对生理的直接影响没有高频噪音那么显着,可是近来国内从事低频噪声研讨的专家指出,低频噪音会引起头痛、失眠等神经官能症,更严峻的影响了人们的健康,噪声污染的消除是一个急待处理的问题。
有没有一种能够既能够消除低频噪声又能够消除高频噪声的办法呢?经过查阅材料咱们发现了一种全新的消噪理念–主动消噪:它经过搜集噪声信号经移相,增益处理后开释与原声波振幅相同但相位相反的声波信号与原噪声相抵消,然后更有用的消除噪声,此办法不只能消除高频噪声还能消除低频噪声,真实营建一个环保、舒适的环境,有利于人们更好的学习、作业和日子。
1.2 项目布景/选题动机
二十世纪二十时代,电子学的开展奠定了有源消声操控(ANC) 的根底,然后拓荒了噪声操控的新领域。1933 年,德国的Paul Lueg 开端提出了ANC 的根本思维,即:在待操控的声场区域树立一个与待消除的声响强度相同、相位相反的声场(即次级声场———secondary sound field) ,运用波的干与原理,人为形成声场的相消干与,然后消除噪声。一起,Lueg 还指出了完成这一思维的或许性:“空气中的声速远小于电脉冲的速度,意味着当声波从它的检测点传到操控点时,在电子电路中有满足长的时刻用于处理这个声信号和驱动操控单元,这段时刻的殷实程度取决于噪声的类型、频率和体系的物理规范”。70 时代今后,跟着声学理论和操控理论的迅速开展,人们逐步对有源消声操控的机理有了更深入的了解。鉴于常见的噪声源大都具有剧烈的时变特性,因而,在自适应理论日渐成熟后,人们开端探究自适应有源消声操控(AANC) 这一极具运用价值的新课题。AANC 以恰当的自适应算法主动调整次级声信号,保证次级声信号能有用地盯梢并抵消噪声信号,到达消除噪声意图。
尽管国内外也有一些人在研讨这个课题,可是实际作用不甚抱负,比方一些消噪耳机,但佩戴着耳机也会给日子带来必定的不方便,戴的时刻长了,人或许会感觉不舒服;在电路完成方面,咱们选用AVR这一低功耗的芯片作为主控芯片,外加一些其他的辅佐芯片元件。此规划与传统的以模仿信号处理完成反相,增益的电路比较功耗要低得多,与那些以单片机+DSP的电路比较要节约许多本钱。
本体系示意图如下:
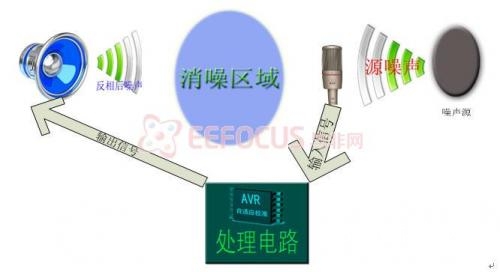
消噪演示图
在某一区域内搜集噪声信号,将其转化为电信号并送往处理电路,处理后能够经过喇叭放出与原噪声反相的噪声,并能够恰好在某一区域内噪声彼此抵消,到达消除噪声的意图。此设备不只适用于那些需求安静的场合,比方教室、图书馆、办公室、卧室、病房等;也相同适用于那些噪声很大,需求下降噪声的场合,比方大型工厂车间、喧闹的菜市场、商场等。
本规划选用AVR高功用,低功耗单片机作为主控CPU,节能方式下电流在nA等级,节约能源,并且它的指令履行速度与数据吞吐量大,选用自适应算法–归一化最小均方算法,稳态差错小,收敛速度快,核算量相对其他算法较小。本体系相对传统的模仿电路消除噪声有着无与伦比的长处,内嵌的自适应算法进行主动校准,将差错操控在较小的规模之内,到达有用的消除噪声,营建一个环保,安静的环境。
二、需求剖析
2.1 功用要求
经过搜集噪声信号,经过处理后能够开释出与原噪声信号相位相反、起伏相同的噪声信号。当需求消噪的时分敞开设备,因为体系自身对消除噪声的区域有必定的约束,所以选用多点布控的办法,在多个方位搜集数据,让噪声消除区域最大化,白日方式下,当声响超越50dB时,主动进行噪声消除;夜晚方式下,当声响超越30dB时,主动进行噪声消除。高规范方式下,当声响超越40dB时,主动进行噪声消除;在低规范方式下,当声响超越70dB时,主动进行噪声消除。
2.2 功用要求
1、体系各模块正常作业,安稳性较好,功耗较低在可容许规模之内;
2、在必定规模内,完成噪声的消除或下降;
3、经过按键完成方式的切换;
4、各方式能够完成相应的功用并到达相应的规范;
5、CPU核算功用强壮,处理数据的速度快,削减延迟时刻,坚持原噪声和反相噪声同步。
6、实施多点布控是能够避免声响因为干与而使空间内呈现声响不均匀现象(一些区域声响强一些区域声响弱);
三、方案规划
3.1 体系功用完成原理
3.1.1技能特色:
任何体系都不可避免地遭到噪声的影响,怎么有用地消除和按捺噪声是多年来的抢手研讨课题之一。噪声按捺办法能够分为两大类被迫噪声按捺和主动噪声按捺。本规划首要研讨依据AVR操控自适应的主动噪声按捺技能及其完成办法,本规划运用自适应算法中的归一化最小均方算法(NLMS),NMLS算法比较最小均方算法具有收敛速度快,稳态差错小,运算量小的特色,在算法规划过程中将运用MATLAB软件对自适应算法在噪声抵消的运用进行仿真,针对各类不同参数和不同输入信号,剖析比较各种情况下的移相增益扩大收敛速度、稳态差错力求完成对噪声信号的消除。在理论和仿真的根底上,结合根本硬件渠道规划移相器,增益扩大器,在编程完成大将选用C言语编程的办法进行编程规划,完成自适应噪声消除功用。
因为主动消噪首要只能消除声源固定的噪声,而对声源不固定的声响消除起来是比较有困难的,对此咱们想出了一些战略来应对,能够在一片区域内进行多点布控,便是能够放置多个话筒和扩音器。经过经过准确的核算能够确认出话筒和扩音器放的方位,这样的话大规模噪声消除便成为了或许。
3.1.2原理阐明:
运用XF-18D麦克风在需求消噪区域进行声响搜集,因为声响信号比较弱小,用扩大器将搜集信号扩大,AVR对搜集的信号进行A/D转化,经过自适应算法对信息进行相应的处理操控移相器和增益扩大器,进行主动校准,使得经过处理发生的信号与理论值差错尽或许的小,信号传送给功率扩大器,功率扩大器将处理好的数据进行恰当的扩大,以驱动扬声器将声响发送到消噪区域,这样在消噪区域正常的噪声遇到与其相位相反,振幅持平的声波,噪声的能量会大大下降,运用这样的原理进行有用的消除噪声。
体系硬件结构图:
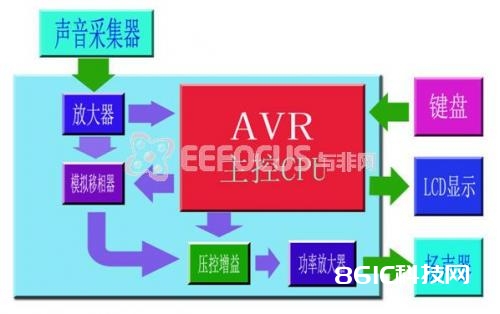
体系硬件结构框图
1、声响搜集扩大模块:
声响丈量经过驻极体XF-18D麦克风阵列进行丈量。XF-18D麦克风是电容式微麦克风,输入信号为声响信号,输出信号经前置扩大电路后进行电压值A/D采样。处理器(AVR)进行A/D采样捕获到较宽规模的声响信号。
2、处理器(AVR)模块:
因为外界来的噪声信号是宽频带信号,信号的起伏也是多种多样,对这种信号的处理需求运用高功用,处理数据快的单片机,运用AVR单片机高功用的特色,核算宽频噪声信号的频率,起伏和相位,选用自适应算法中的最小均方差算法对移相器,增益扩大器进行校准,使移相增益之后的信号与噪声信号的差错到达最小。以到达削弱或消除噪声的意图。
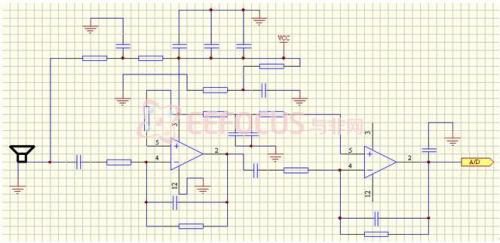
3、移相模块:
移相电路运用AD5227 64步递加/递减数字电位器%&&&&&%3能够操控输进到输出的移相,并替换电阻值。核算输出中心频率的公式为:FCENTER=1/(2*∏*R*C)。AD5277能够取各种不同规模的电阻值。该比如中的电阻为10kΩ。经过步进64个点,720kHz输进正弦波能够从0度到360度循环若干次。AD5277作为一个电位器,A和B为两头,W为擦洗器。

4、压控增益模块:


如图所示为此规划压控增益扩大电路。运用场效应管栅极电压与漏-源极电阻RSD之间成近似对数联系可构成压控增益扩大器。该电路选用集成芯片LM307作为扩大电路,采纳反相输入方式。由图可知,RSD与R1组成分压电路(对Vi分压)。4个1N914二极管的管压降与电阻R5的压降之和等于场效应管的栅极电压VG。该VG与操控电压VC呈非线性联系,但操控电压VC与扩大器增益的衰减量的对应联系如图(b)所示。由图(b)可知,操控电压VC越大,扩大器增益的衰减量越小,即当VC≥7V时,扩大器的增益最大(衰减最小);当VC=0V时,扩大器增益的衰减量最大(增益最小)。图中所示电路增益的最大值和最小值为:
当VC≥7v时,增益的最大值为:Avmax=-R3/(R1 R2)。
当VC=0V时,增益的最小值为:Avmin=-R3/(R2//RSD R1)。
电路的上限截止频率取决于R1和场效应管极间%&&&&&%所构成的低通滤波器。关于图中所示元件参数,其最坏上限截止频率可达1.8MHz,该数值是在VC≥7V的情况下测得的(即电路增益最大时测得的)。
LM307集成芯片的首要参数(典型值)
|
Vs=+-15V Ta=25°C |
|||||
|
参数 |
LM307 |
单位 |
参数 |
LM307 |
单位 |
|
输入偏流 |
250 |
nA |
电源电压规模 |
+-5~+-15 |
V |
|
输入差模电阻 |
0.5 |
MΩ |
输出电压峰峰值 |
+-12 |
V |
|
共模输入电压规模 |
+-12 |
V |
静态电流 |
3 |
mA |
|
共模按捺比 |
70 |
dB |
|||
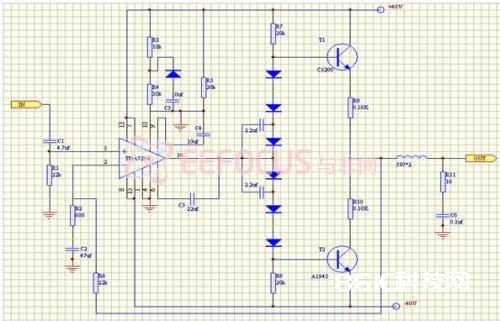
5、功率扩大器:
如下图所示,R6为反应电阻,取值22kΩ较适宜,R6也决定本电路的增益,值大增益将增大。
功率管静态电流取决于R7、R8,当其值在10kΩ以下时,电路将处于甲类状况,静态电流可调至100mA~2A,取30kΩ时,电路作业于乙类且适当安稳。
3.2 硬件渠道选用及资源配置
因为处理数据量较大,且处理数据的速度要求相对较高,要求CPU功用相对较高,选用32位高功用AVR单片机(SDRAM操控器)及片外SDRAM数据存储芯片;显现环境噪声分贝数需求用LCD屏,体系的各个模块需求用到相应的芯片:1、搜集信号扩大模块 OPA2394运算扩大器 2、模仿移相模块 AD5277芯片 3、压控增益 LM307 4、功率扩大模块选用TDA7294运放
依据以上需求本规划选用EVK1100硬件开发渠道。
3.3体系软件架构

图一 体系软件架构
软件程序分为上图所示几个模块,首要有初始化模块、时钟模块、方式操控模块、按键操控模块、显现模块、数据处理模块等。
初始化模块:首要是初始化芯片和硬件体系,时钟用于核算时刻、显现时刻,能够依据时刻进行方式切换。
方式判别与挑选模块:用于挑选履行哪种方式,方式选项首要有主动方式与手动方式,其间主动方式能够依据时刻进行判别是白日方式仍是夜间方式。不同方式对噪声消除的作用也是不同的。
按键操控模块首要是为了判别用户输入的信息,从而进行相应的处理。
显现驱动是为了驱动体系送来需求显现的数据。
数据处理模块:最重要的模块,选用自适应算法中的最小均方差算法,处理外部输入的采样信号,首要有核算出输入信号的巨细并量化为分贝巨细,然后将处理后的数据送出显现,它还要经过剖析输入的信号来操控数字电位器与功放的增益参数。
数字电位器模块:因为原噪声经过搜集,扩大电路之后相位起伏会有所改变,AVR单片机对搜集到的信号核算出相位,频率,振幅之后经过设置pwm的占空比操控AD5277芯片的clk,操控移相器对噪声进行相应的移相作业。
压控增益模块: 从移相器电路接收到的信号起伏与噪声信号会有所差错,AVR单片机经过核算,经过电压信号操控增益扩大模块知道增益到达较好的作用,再将信号发送到功放经过扬声器将信号发送出去,因为扬声器传送的声响信号与间隔平方成正比,所以扬声器需求放到与消噪区域必定间隔的当地。
3.4 体系软件流程

图二 程序运转流程图
从初始化开端,进行相应的复位与初始化体系,默许进入智能方式,进行噪声消除,所谓智能方式是指白日(7:00-21:00)当噪声大于50dB是就开端消除噪声,晚上(0:00-7:0021:00-0∶00)当噪声大于30dB时就开端消除噪声,与智能方式相对的则是手动方式,该方式分为两个规范,高规范方式与低规范方式,其间高规范方式在噪声大于40时就开端消除噪声,低规范则是在噪声大于70时开端处理噪声。进入相应的方式后,就会按不同的规范来处理噪声。
显现首要是显现当时时刻、当时环境的噪声巨细及所挑选的方式。
中止操控模块
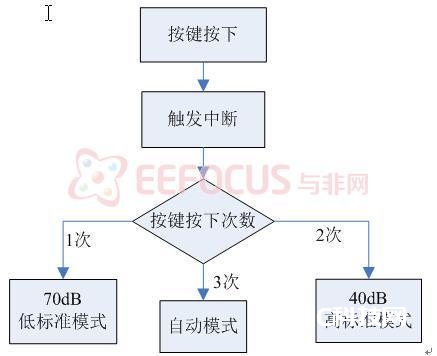
图三 中止处理流程图
当按键按下时,触发中止,在中止处理程序中,依据按键按下次数切换至相应方式,按下一次进入低规范方式,此刻声响最高答应到达70dB,例如进行剧烈评论时,可切换至该方式;当按下两次时,切换至高规范方式,此刻要求声响不高于40dB,合适环境要求较为安静的场合;当按键按下三次时,康复为主动方式。
3.5 体系估计完成成果
上电之后初始化,复位作业正常,方式正常切换,单片机内部程序运转正常,核算数据差错在3%(可控规模)之内,移相器电路移相差错在5%规模之内,压控增益差错在可容许的规模之内,噪声消除或许消除的不会很完全,会残留一部分能量较小的,还会有一点声响。体系整体功耗在可容许的规模之内。






