


一、项目简介
北京奔跑-戴姆勒•克莱斯勒轿车有限公司(简称BBDC)坐落北京经济技能开发区,于2005年8月8日正式建立。其前身北京吉普轿车有限公司创立于1983年5月5日,是我国轿车行业第一家中外整车合资企业。
BBDC是一家具有世界轿车制作业抢先技能与制作水平,融轿车研制、制作、出售和售后服务为一体的现代化企业,其出产厂房占地3200亩。第一期建造工程30万平方米,具有年产10万辆轿车的出产能力,最终将抵达年产30万辆轿车的方针。BBDC出产梅赛德斯-奔跑、克莱斯勒、Jeep、三菱等许多世界知名品牌的轿车和越野车,并为我国军队定点出产,具有彻底自主知识产权的第二代军用轻型越野车。
BBDC出产线自动操控体系是国内首家运用Integra规范的项目,该规范的施行极大的进步了作业的功率和优化了作业流程。它共分为5个子体系,依照工业流程分为:调整打磨体系、漆前缓存体系、漆后缓存体系、总装体系和门线体系。其间调整打磨体系是将冲压焊装体系出产的车身进行打磨,确保车面的润滑,为喷漆车间的喷漆做好预备。为了和谐不同出产线的更好的出产,进步出产功率,在进入喷漆车间前,有必要对不同车型的车身进行一致的办理,漆前缓存便是对车身进行有用的存储、运送的操控体系。为了完结相同的意图,在车身从喷漆车间出来后,也需求漆后缓存体系对车身的和谐办理。然后车身就被送往总装体系,进行车内饰、底盘以及发动机的装置。一起车身的车门被摘取进行门内饰的装置,在车身抵达门线体系时,车门又被重新装置。最终你将看到美丽的轿车下线。
二、体系工艺介绍
调整打磨体系中,冲压焊装后的车身由EMS(自行电动小车运送体系)上的电动小车运送至上件滑撬升降机,经过升降机送到板式链,再由调整线板式运送机驱动板式链将车身送到下件滑撬升降机上,然后送到漆前缓存体系;由漆前缓存体系中的动力滚床进行运送,举升动力滚床进行提高,拐弯处由90度偏疼旋转滚床进行车身转向,再由链式移行机将车身放在不同的存储线上,有序的进入喷漆车间;从喷漆车间出来后再有90度偏疼旋转滚床转弯,由动力滚床进行运送,举升动力滚床将车身下降至适宜的高度,再由链式移行机将车身放在不同的存储线上,合理有序的送入到总装体系;进入总装体系后首先由下件滑撬升降机将车身送到内饰工艺链上,进行车内饰的装置,完结后转入快链运送,然后送到底盘工艺链上装置底盘,这段工艺完结后再转入快链运送,来到总装体系中的重要工艺线——发动机的装置。这些作业进行的一起,门线体系也在对车门进行门内饰的装置,比及车身装置好发动机后进行车门的装置,最终进入总装的最终一个工序进行加注润滑油以及增加燃料。
整个流程的自动操控体系选用散布式的操控方法,首要经过中控室里由WinCC组态的监控计算机向PLC CPU416F-2DP宣布操控指令,需求变频操控的电机经由从站ET200S运用ET200FC操控变频器MASTERDRIVE来操控,不需求变频的电机经过ET200S马达发动器来操控,滑撬体系还运用了MOBYE进行车身的辨认。比较会集的传感器/履行器设备经过ET200eco操控。手动操控首要经过本地的人机界面PP17和TP170B宣布本地操控指令。
三、操控体系的构成
因为该项目遵照Integra规范,因而计划是严厉依照这个规范履行。Integra规范是从国外引进的比较先进的,针对轿车行业开发的规范,它现已被成功运用于德国梅赛德斯奔跑项目,得到了很高的点评。BBDC项目初次将Integra规范引进我国,并发布了IntegraBBDC规范,它对操控结构、硬件画图、软件开发、Safety技能、现场总线、体系接口、人机界面、软件库和培训流程进行了具体的论述,Integra规范的引进将大大推进我国轿车制作业的开展。
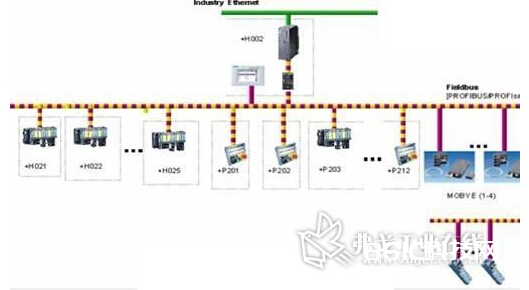

图1 漆前缓存线电气体系装备图
因为各体系硬件装备大致相同,仅仅数量上的不同,咱们就以图1所示的漆前缓存电气体系装备图剖析硬件挑选计划,从硬件装备图能够看出,监控级运用工业以太网将操控层PLC取得的数据传送到上位监控计算机,这是因为厂房面积大,各个操控体系散布广泛决议的,别的因为整个体系传输的数据量大(有一万多个点),这就决议了工业以太网是最佳挑选。并且为了确保出产的牢靠性,体系中的PLC选用的是CPU416F-2DP,一起选用了部分safety模块,这样就进步了体系的牢靠性。现场挑选一个触摸屏是为了能够在现场的操控柜上实时的检查各个点的状况和CPU的信息,还能够确诊Profibus总线的通讯状况,这是为了便当现场人员调试,也给后期保护带来便当。CPU下面接了一个中继器,首要是起到确诊网络和信号扩大的效果,能够实时的监控通讯状况,如有问题能够及时的发现处理。别的因为每个子体系既独立操控,又彼此联络。一切选用DP-Coupler来进行不同CPU之间的数据交换。对有本地启停设备的当地挑选PP17面板,这种计划比运用触摸屏操控愈加牢靠,并且也更简单习惯现场恶劣的环境。关于是否挑选变频器MASTERDRIVE,首要是依据工艺的要求挑选的电机,假如电机对错变频的能够挑选马达发动器来发动电机。而关于现场一些特别点的不能经过操控柜中的模板收集的,可挑选ET200eco来进行现场收集而无需放在操控柜里,滑撬体系运用MOBYE进行车身的辨认。图5即为总装体系的主监控画面,从图中各工位的色彩能够清楚的看出各个工位以及整个体系的作业情况。
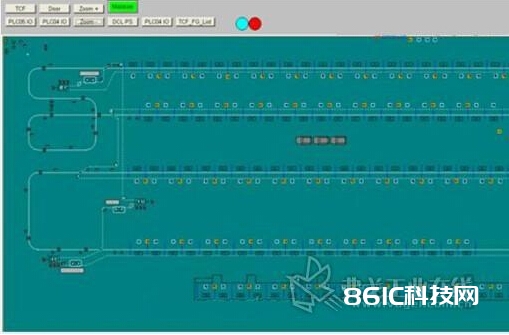
图2 总装体系主监控画面
对收集数据和监控出产的上位机,选用了服务器-客户机的形式,如图2所示,共有2台服务器和5台客户机,2台服务器互为冗余,选用的 HPProLiant DL服务器,装置了Windows2003 server standard版操作体系,WinCC装置的是6.0 SP4版别。5台客户机选用的是工业操控计算机,装置了Windows2000英文版操作体系,WinCC版别和服务器相同。挑选这种计划首要是根据三方面的考虑。①牢靠性高:互为冗余的服务器进行数据的守时同步,确保了数据的一致性和牢靠性;②开发周期短:这种形式只需开发一个服务器的程序即可,两台服务器互为备份程序彻底相同,而客户端的PC 无需编写程序,只需经过工业以太网来访问服务器的程序即可,开发难度小并且周期短;③本钱低:因为本项目通讯点多,选用其它方法购买授权的费用相对较高,这种形式客户机端只需128点的授权费用,这样整体费用大大下降。

图3 上位监控体系装备图
四、操控体系完结的功用
尽管本项目巨大,通讯点许多,可是各个子体系设备很大部分是相同,也具有相同的操控要求,因而咱们将整个项目依照设备划分红的不同的功用组,这样能够增大一次开发的运用率,避免了重复开发,节省时刻和本钱。
1.升降机的操控
升降机在高位时,电动锁紧器锁紧到位,升降机上滚床无撬体,上层滚床有撬体等候,撬体经承认与EMS上的电动小车所带车体相一致,上层滚床高速把撬体送到升降机的滚床上,经变速开关变为低速,行走至占位开关中止。电动定位器封闭到位,电动锁紧器松开到位,收到EMS空中自行电动小车答应接车信号,升降机低速升到接车位,待收到EMS空中自行电动小车答应升降机下降信号后,升降机高速下降至变速开关变为低速,低速下降到到位开关中止。电动定位器翻开到位,待条件答应,升降机上滚床高速把撬体送到板式链的滚床。升降机高速上升至变速开关变为低速,低速上升到到位开关中止,履行完一次循环。
2.举升台的操控
举升台在高位,基层滚床无撬体占位,上滚床高速把撬体送到基层滚床,经变速开关变为低速,行走至占位开关中止;举升台在高位,基层滚床占位中止,电动定位器封闭到位,车体检测开关检测撬体上无车体,宣布答应涂装送车信号,当车体检测开关检测撬体上有车体,收到涂装送车完毕信号,前面答应送车,即举升台在低位,中止器再封闭到位,举升台鄙人降到位。撬体被链式移行机送到中止器,占位开关一起占位,举升台把撬体举升高位,一起举升台举升到高位,基层滚床等候接撬体,履行完一次循环。
3.总装门线升降机、中止器、推车机的操控
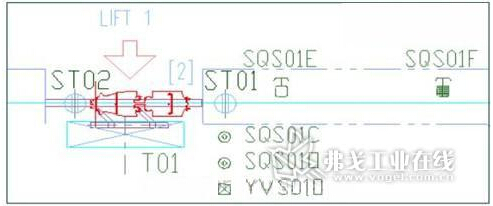
图4 升降机、中止器和推车机的操控
如图4所示,中止器ST01占位,中止器ST02没占位,1#升降机在高位,中止器ST02占位与ST01占位之间没有移动的吊具,中止器ST01翻开到位,推车机T01由慢-快-慢把吊具推至ST02占位,中止器ST02占位延时1秒,推车机T01由慢-快-慢退回到位,1# 升降机由慢-快-慢下降到位,等装完车门,经工位工人承认后,1#升降机由慢-快-慢上升到位,中止器ST02前面答应进车,中止器ST01与ST02一起翻开到位,推车机T01由慢-快-慢把吊具从ST02推出,把吊具从ST01推至ST02占位,中止器ST02占位延时1秒,推车机T01由慢-快-慢退回到位,1#升降机下降,履行完一次循环。应留意的是:升降机不在上升到位,中止器ST01/ST02有必要在封闭到位,推车机有必要在后退到位,不然当即停线。
升降机的自动操控是项目中的难点,首要是因为升降机的自动操控假如毛病就有或许将设备以及车体损坏,对一次调试成功的要求很高。升降机尽管有硬件保护措施,需求特定条件,比方升降机只要在失电后,抱闸将会抱死,因而关于升降机操控程序的编写需求重复修正,模仿实验,才干确保调试中的满有把握,不会出安全事端。
五、总结与点评
该项目于2006年4月份进厂调试,7月份调试完毕。经过对厂方操作职工进行相应的培训,熟练掌握了操作技能后,他们给出了很好的点评:
1.该项目进步了出产功率和办理质量,明显进步了工艺水平,改进了出产环境,减轻了劳动强度,增加了企业的效益。
2.进步了出产的安全性,削减了事端的产生,因为该项目计划中对出产安全适当注重,设有许多急停按钮,在编写程序中,对重要设备有多重保护,然后确保了设备、人身的安全。
3.加大了设备牢靠性,safety模块的运用对设备的输入输出点都是两层比照的,确保每个点的信号都是实在牢靠,设备的毛病率下降了,出产的安全性就进步了。
六、运用领会
1.Integra规范的运用极大的进步了功率,它规则了从画图、硬件、软件和培训。这就确保了工程进度不会因为人员的调整而影响,并且这种规范也比较适用大的项目,这样能够将项目细化,我们分工合作,因为一切的作业都是遵照规范,内容格局以及运用符号都是通用的,BBDC能在很短的时刻完结开发调试,很大的部分归功于IntegraBBDC规范的运用。
2.自动化编程,因为该项目信号点多,WinCC程序的开发作业量大,并且有许多仍是重复的作业,这种情况下,运用Excel表格将一些变量信息以及目标的特点修改,经过WinCC中的VBA功用编程完结修改很多的画面和目标,大大的进步了作业功率,并且将一些重要信息备份,也便于后期的保护。
3.Safety技能的运用,极大的进步了整个体系的牢靠性,Safety模块确保了输入输出信号的牢靠性,设备的安全性进步了,操控体系功能相应的改进了。






