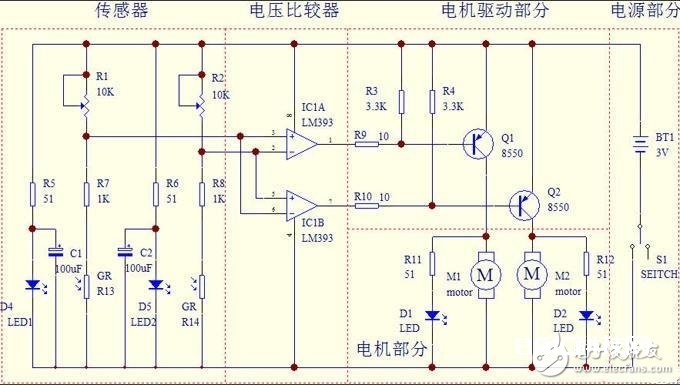
在白色的场所上有一条16毫米宽的黑色跑道,咱们的循迹小车能沿着黑色跑道主动行进,不管是跑道怎么曲折小车都能主动行进真是太奇特了!咱们知道当光源射到白色物体和黑色物体上时的反光率是不同的,咱们这儿用赤色的LED作为光源,光线经过地上反射到光敏电阻上经过检测光敏电阻阻值改动能判别小车是否行进在白色区域上,假如检测到是黑色跑道,阐明小车跑偏,这一侧的电机就会减速乃至停转这一侧的绿色的LED平息,驱动小车向相反方向行进,这样小车就能一直沿着跑道行进了。
本着从简到繁的准则,咱们首先来制造一款由数字电路来操控的智能循迹小车,在拼装过程中咱们不但能了解机械原理还能逐渐学习到:光电传感器、电压比较器、电机驱动电路等相关电子常识。
下面咱们先来了解一下三个首要器材:
光敏电阻器材
这便是光敏电阻,它可以检测外界光线的强弱,外界光线越强光敏电阻的阻值越小,外界光线越弱阻值越大,当赤色LED光投射到白色区域和黑色跑道时由于反光率的不同,光敏电阻的阻值会产生显着差异,便于后续电路进行操控。
LM393比较器集成电路
LM393是双路电压比较器集成电路,由两个独立的精细电压比较器构成。它的作用是比较两个输入电压,依据两路输入电压的凹凸改动输出电压的凹凸。输出有两种状况:挨近开路或许下拉挨近低电平,LM393选用集电极开路输出,所以有必要加上拉电阻才干输出高电平。
带减速齿轮的直流电机
直流电机驱动小车的话有必要要减速,不然转速过高的话小车跑得太快底子也来不及操控,并且未经减速的话转矩太小乃至跑不起来,咱们专门定做的这种电机现已集成了减速齿轮大大降低了制造难度十分合适咱们运用。