


跟着工业出产自动化水平的进步,各种传感器的运用也越来越多。旋转编码器作为速度和位移反应的传感器,首要运用于数控机床、高精度的闭环调速体系、伺服电动机、异步电动机、步进电动机、电梯曳引机、电梯门机甚至机械轴等需要对运动速度和位移信息反应的自动化操控场合,以确保机械的高精度安稳作业,然后进步出产功率和保证安全运营。
本文针对旋转编码器在工业现场中的运用,依据LPCI768硬件渠道,规划出一种旋转编码器收集模块,该模块内部具有高精度剖析、整形、解码电路,可一同对2路编码器输入信号进行剖析、解码。经过处理的旋转信号经过高功能处理器进行收集及数字滤波。旋转编码器一同还对2路编码器信号进行角速度核算,终究模块经过CAN总线将收集到的旋转方位值以及角速度值发送到DPU(涣散处理单元),以供工业现场运用。
1 旋转编码器
旋转编码器是一种丈量滚动部件运动状况的传感器,是将旋转的机械位移量转换为电气信号,对该信号进行处理后检测方位、速度等的传感器。所谓编码,其实便是将旋转视点的信息转换为单片机可读的电信号的进程。旋转编码器依据作业原理能够分为触摸式、光电式和电磁式三种}依据输出信号的方法又能够分为增量式和绝对值两种,其间增量式编码器是工业中最常用的编码器。
增量编码器包括码盘、发光元件、接纳元件和信号处理部分。当轴旋转时带动码盘旋转,这样刻线处透光,问隔处不透光,透过的光被接纳元件接纳并输入到信号处理部分,发生脉冲信号输出,输出信号一般包括A、B两相(相位差90°),有些编码器每转一圈还会输出一个零位脉冲Z,作为机械参阅零位。当主轴以顺时针方向旋转时,A通道信号坐落B通道之前;当主轴逆时针旋转时,A通道信号则坐落B通道之后,然后能够由此判别主轴是正转仍是回转。
2 CAN总线
CAN总线(ControllerArea Network),即操控器局域网,是国际上运用最广泛的现场总线之一。CAN总线开始是德国Bosch公司于1983年为轿车运用而开发的,它是一种能有用支撑分布式操控和实时操控的串行通讯网络,归于现场总线(Field Bus)的领域。跟着CAN总线的不断完善和开展,它现在已被国际化规范安排采用为国际规范。
CAN总线是一种多主方法的串行通讯总线,根本规划规范要求有较高的位速率和高抗干扰性,并且能够检测出发生的任何过错。信号传输间隔到达10 km时,依然可提供高达5kb/s的数据传输速率。CAN协议经lSO规范化后有IS011898规范和IS011519规范两种。它们两者的差异在于对物理层的界说不同。ISOll898是通讯速度为125 kb/s—1 Mb/s的CAN高速通讯规范,而ISOll519是通讯速度为125 kb/s以下的CAN低速通讯规范。
3 硬件规划
依据体系功用需求,本文选用NXP公司出产的LPCI768处理器,该处理器是一款依据ARMCortex–M3内核的32位处理器,它具有3流水线和哈佛结构,带独立的本地指令和数据总线以及用于外设的略微低功能的第三条总线,一同还包括一个支撑随机跣转的内部预取指单元,作业频率可达100MHz。LPCI768处理器的外设组件包括高达512 kB的Flash存储器、64 kB的数据存储器、4个通用定时器、8通道的12位ADC、10位DAC、电机操控PWM、4个UART、2条CAN通道、带独立电池供电的超低功耗RTC和多达70个的通用I/0管脚.图1为旋转编码器收集模块整体框图。

图1 旋转编码器收集模块整体框图
3.1 CPU部分
由芯片手册可知,LPCI768能够挑选内部RC振荡器或许主振荡器作为体系时钟源,而因为内部RC振荡器精度无法满意CAN总线通讯的要求,而主振荡器能够作业的频率规模为1 MHz~25 MHz,故选取12 MHz的晶振加上22 pF的电容构成Pierce振荡器,作为主振荡器的时钟源。因为本体系未运用芯片的A/D模块,故VDDA能够跟VDD一同衔接到3.3V,每对VDD、GND引脚间需衔接一个0.1uF的去耦%&&&&&%。一同JTAG及通讯引脚均经过10k的上拉电阻衔接到VDD,以进步信号传输的安稳性。
3.2 旋转编码器收集部分
旋转编码器运用于视点定位或丈量时,因为旋转轴的晃动或许引起编码器输出波形的颤动,然后引发误计数现象,在这种状况下就不能对波形进行正确计数,本体系经过一个单稳态触发器来消除旋转编码器输出脉冲信号的颤动。图2为旋转编码器收集电路中的一路。
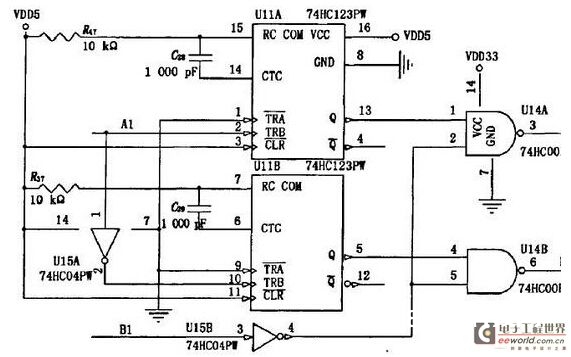
图2 旋转编码器收集电路中的一路。
剖析电路可知,当旋转编码器正转时,F1输出脉冲序列,当旋转编码器回转时,R1输出脉冲序列闭,电路仿真波形见图3。






