


摘要:CAN总线功能优越,是当时的研讨热门,本文提出一种根据STM32F107和SN65HVD230组成的CAN总线智能节点测验体系。别离规划了根据CAN总线智能节点体系的硬件结构和软件规划,完结了安稳牢靠的数据丈量操控,提高了工业现场的可操作性。实践运用标明,该计划提出的智能节点组态灵敏、结构简略、功能安稳、扩展性好。
关键词:CAN总线;智能节点;STM32F107
现场总线是工业主动化范畴中完结分布式操控而发生的工业级局域网,其能够完结操控体系内各节点的实时数据通讯,具有杰出的牢靠性,成为当时工业操控范畴内的研讨热门。在很多现场总线中,CAN总线以其高功能的特色,被广泛运用于航天航空、工业操控、环境监测,医疗设备等多个方面。根据CAN总线的操控节点可完结对工业操控中多点
的分布式操控,具有重要的研讨价值。
1 整体结构规划
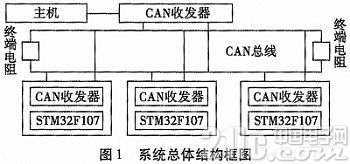
CAN总线选用了不同于传统的分布式操控体系的构架,由涣散于工业操控中现场智能节点完结传统体系中主机的惯例测验与操控。因而根据CAN总线的分布式操控体系的主机不用监控底层设备,完结高功能的高层次操控与办理。一般根据CAN总线的工业分布式操控体系中由主机、数据转化器以及智能节点组成。
整个体系的结构如图1所示,主机和智能节点经过CAN总线衔接,智能节点作为从机经过CAN接口衔接CAN总线。主机由根据LabVIEW规划的监测软件和硬件资源组成,首要完结对智能节点的监测以及测验数据的显现和存储。数据转化器是串口转CAN总线完结数据的转化,并完结转发。各个智能节点都挂接到 CAN总线上,将收集到的数据发送到CAN总线上或许承受CAN总线上数据进行处理。智能节点首要由微操控器、CAN收发器以及相应I/O接口组成。
智能节点规划运用STM32F107作为其主控芯片,集成多项高功能工业标准接口的互联型微处理器,其选用32位ARM Cortex—M3中心,主频高达72 MHz,其超卓的兼容性以及高功能,低价格,具有较大的RAM和ROM,关于程序量较大的嵌入式体系有杰出的支撑,广泛运用于工业操控中。
新STM32外设丰厚强壮,包含10个守时器,其间一些不只能够进行一般的守时还能够进行脉冲捕获、以及PWM生成;2个12位AD模数转化器,其最大采样率高达2M sample/s、2个12位DA数模转化器、2个I2C接口、5个UART接口支撑最高921 600 bps和3个SPI端口和高质量数字音频接口IIS,具有全速USB(OTG)接口,支撑2路CAN2.0B接口,以及高速以太网10/100 MAC模块接口。
CAN收发器挑选德州仪器的SN65HVD230,该器材具有高速率、高抗搅扰才能和高牢靠性CAN总线的串行通讯。该芯片在CAN总线体系中具有广泛的运用,便于替换。
2 体系硬件规划
一般的CAN总线智能节点由三个部分:微操控器、CAN总线操控器以及CAN总线收发器组成。微操控器STM32F107内部现已集成了CAN总线操控器,故本文触及的智能节点首要由STM32F107和CAN总线收发器组成。
图2是根据STM32F107智能节点体系的CAN总线部分原理图。图中STM32F107的PD0和PD1脚别离为CANRX和CANTX引脚,为 CAN总线的输入输出管脚,衔接CAN总线收发器才能与CAN物理总线相连。CAN收发器SN65HVD230,具有速度高达1 Mbps的差分发送、差分接纳才能,供给三种作业形式:高速、低电流待机和斜率操控。本身具有短路维护、失地维护、过压维护和过热维护。常态下作业电压是 -2V~7V,瞬时耐压规模是-25V~25V。CAN收发器SN65HVD230第8引脚经10 k电阻与PD15衔接,这样能够由微操控器操控其作业形式,当PD 15为低电平时为高速作业形式,PD15为高电平时为低电流待机形式。CAN收发器SN65HVD230与CAN总线的接口规划时选用较强的抗搅扰办法,以及过流维护等方法。其间与CANH、CANL串连的5 k电阻可起到必定的限流效果;并联在CANH、CANL和地之间的32 pF的小%&&&&&%,避免高频搅扰,一起具有必定的防电磁辐射才能;在CAN总线的输入端与地之直接的防雷击管,能够滤除CAN总线输入端和地之间的瞬态骤变搅扰。
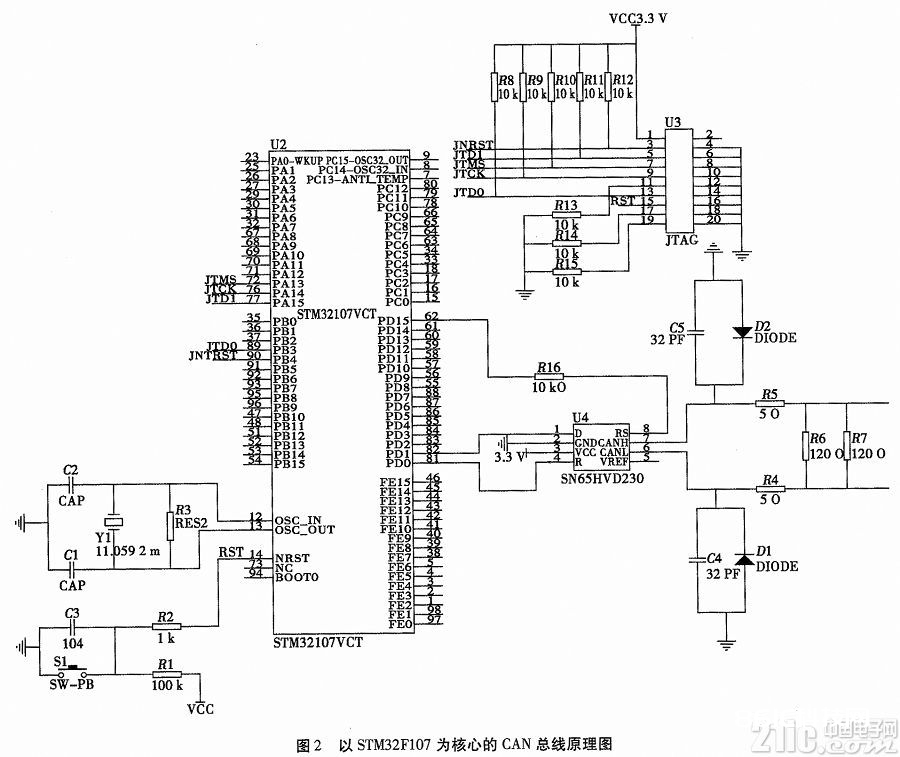
复位电路则是包含按键复位电路和上电主动复位电路组成,加强其牢靠性。本文为了体系的调试,集成了JTAG的调试接口。
3 体系软件规划
根据CAN总线的智能节点主程序流程如图3所示,其发送方法经过查询完结,而发送数据方法经过中止来完结。智能节点的主程序首要包含体系及外设初始化、CAN操控器初始化、数据发送、数据接纳部分。
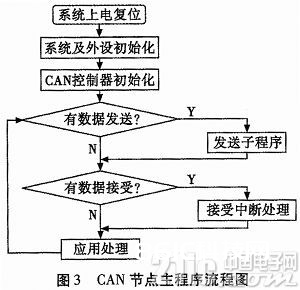
在CAN操控器初始化时,有必要要求其操控寄存器中复位方位较高时,才能够拜访寄存器。因而,在初始化寄存器前,体系有必要保证现已进入复位状况,在拜访CAN总线时寄存器中的内容决议波特率的巨细。总线守时寄存器的初始化值应根据CAN操控器的晶振频率进行规划。
数据发送时,CAN操控器将数据发送到CAN总线是由CAN操控器主动完结的,发送主程序将发送数据的信息帧发送到CAN的发送缓冲区,然后发动发送指令即可。
数据接纳时,CAN操控器从CAN总线将数据读取到CAN接纳缓冲区也是主动完结的。接纳程序需要从接纳缓冲区读取数据。规划时充分考虑读接纳缓存器(RBF0和RBF1)内容后,微操控器有必要经过置开释接纳缓存位为高,然后开释缓存器,使得另一个当即变为有用。
4 结束语
以STM32F107微处理器为中心,规划了CAN总线的智能数据收集节点,该体系充分发挥CAN总线的长处,具有高牢靠性、高抗搅扰性、高传输率以及灵敏的组网方法等。该智能节点可完结分布式多节点测验,完结了测验进程智能化和网络化,在工业测控范畴有宽广的运用远景,尤其是处理数据较多和实时性苛刻的环境下,该规划节点会愈加有优势。
- STM32单片机中文官网
- STM32单片机官方开发工具
- STM32单片机参阅规划






