混联组织是并联组织与串联组织相结合的一种机械结构办法,并联组织是其中心组成部分。并联机床的典型结构是Stewart途径,由动态途径和6根可弹性杆件构成。并联机床自1994年面世以来,因其结构简略、刚度大、重量轻、加快功用好、承载才能强、模块化程度高级长处,遭到世界机床职业的高度重视。现在全世界已有数十家公司进行这一新式机床的研讨,并现已开发出了多种不同结构类型的并联机床。
并联机床的结构和装备呈多样化办法,与传统机床在运动传递原理上有着实质的差异。在传统的机床中,各伺服轴的运动彼此独立,刀具的运动量是各伺服轴运动量的线性组合。而在并联机床中,各伺服轴的运动彼此祸合,刀具运动量是各伺服轴运动量的非线性映射。因而很难有一种操控体系能合适一切并联机床的要求,这就要求机床开发者自行装备操控硬件和软件,并要求并联机床的操控体系有必要是敞开结构以进步体系的适用性。
现在,比较实践的完结敞开式数控系统的途径是PC+多轴运动操控器。在这种结构中,PC机处理非实时部分,实时操控部分由多轴运动操控器来承当,构成多级分布式操控形式。这样架构出来的数控体系既具有前端PC机的柔性,又具有专用CNC体系的稳定性和可靠性。
现在,在国内市场上,功用价格比较高的当属可编程多轴运动操控器(Program Multiple Axis Controller,PMAC)敞开式操控体系。因为PMAC优异的轨道盯梢才能和精度,在许多高功用的数控体系和研讨项目中都选用它构建敞开式操控体系。Turbo PMAC是PMAC系列的晋级版别,坚持了PMAC的优秀功用,其特有的多种敞开特性更合适于构建杂乱的敞开式数控系统。
1 PRS-XY混联组织描绘
图1所示为新式的PRS一XY混联组织结构布局简图。


该组织由并联组织和串联组织两部分构成。上半部分为一个3自由度的PRS型并联组织,包括固定途径和动途径,固定途径和动途径之间经过3个定长杆件衔接,每一杆件链包括移动副、滚动副和球面副。3个移动副水平120°均匀分布在固定途径的立柱上,并由直线电机驱动。该组织的动途径具有一个平动自由度(Z轴)和2个旋转自由度(A,B轴)。下半部分为X-Y作业台,具有2个平动自由度(X,Y轴)。该混联组织为五轴运动加工途径,选用了串联驱动和并联驱动并用的混联驱动原理,兼有并联机床和传统机床的长处,克服了并联机床作业空间小的缺陷,可应用于杂乱型面零件的加工。
2 数控体系硬件的构成和特色
操控体系选用“PC+运动操控器”的敞开形式,如图2所示。
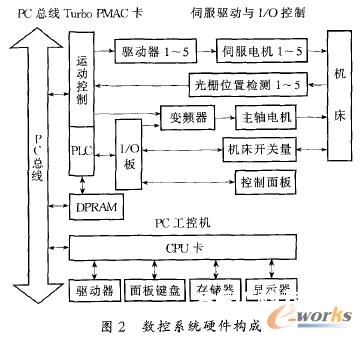
PC机选用研华AWS-2848VTP-体化作业站,运动操控器为美国Delta Tau公司的Turbo PMAC多轴运动操控卡。操控体系包括5套伺服驱动体系,别离用于并联组织的3组直线电机驱动和串联组织的2组沟通伺服电机驱动。选用光栅尺进行方位检测。经过Turbo hMAC的5个伺服操控通道,完结5组伺服体系的闭环操控。使用Turbo PMAC的第6个伺服通道操控主轴电机变频器,完结主轴调速,以支撑数控代码中的主轴速度指令。I/O板衔接到Turbo PMAC上,经过内置的PLC功用操控机器的辅佐功用设备,主轴启停,检测机床限位,驱动指示设备和报警设备,检测操控面板输人指令信号等。DPRAM为双端口存储器,用于完结PC机与Turbo PMAC之间的无需握手的高速数据通讯,使数据传输愈加流通,确保机床的实时操控功用。
操控体系的特色是以PC总线工业操控核算机为操控中心,以PMAC多轴操控卡为运动操控模块,构成以PC机为上位机、Turbo PMAC多轴操控卡为下位机的分布式操控。
3 数控体系作业原理
图3为数控体系的作业流程,次序由APT,PC,Turbo PMAC和伺服驱动体系4部分完结整个数控进程。
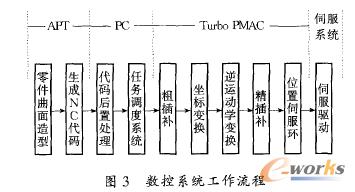
APT为主动编程东西,完结零件的曲面造型、轨道规划和NC代码生成。可使用现在通用的CAD/CAM软件作为APT主动编程东西,典型的有UG和Pro/Engineer软件。关于APT生成的NC代码,需进行代码的后置处理,完结NC.代码的格局转化和语法规矩查看,以习惯五轴混联机床的NC代码操控。后置处理是专用模块,是面向该棍联机床专门开发的处理软件程序。
如前所述,并联机床的刀具在操作空间的运动是关节空间伺服运动的非线性映射,刀尖轨道规划和编程在虚轴上进行,一般依据笛卡儿坐标,而实践驱动轴在并联杆系的节点上,是依据关节坐标的,它们之间的运动对错线性关系。因而,有必要经过组织的逆运动学进行改换,将虚轴的规划量转化为实轴的操控量,该进程又称为真假映射川。因为真假改换很强的非线性性,为确保精度,在实施运动学改换前,还有必要首要对规划轨道(包括直线段)进行数据点密化,即在笛卡儿坐标空间中进行粗插补。经过粗插补处理,能够有效地削减因为非线性映射形成的原理性差错。选用极小的采样周期进行粗插补,所发生的此类差错乃至可忽略不计,但插补所发生的很多的数据需求传送到运动操控器中,因为通讯速率的约束而导致在线实时操控功用难以完结。
本体系充分使用了Turbo PMAC供给的运动学核算功用,将逆运动学核算程序下载到Turbo PMAC中,并且由Turbo PMAC来完结粗插补处理,极大地下降了PC与Turbo PMAC之间的数据传输量,进步了数控体系的实时功用。粗插补选用时刻切割算法,经过Turbo PMAC供给的段细分功用完结,并经过特定的I变量设定粗插补周期。精插补使用Turbo PMAC内置的样条插补功用,以此来供给伺服操控所需的方位指令数据。
操控体系的这种规划办法不只能有效地处理PC与Turbo PMAC之间的数据传输瓶颈,并且可充分使用Turbo PMAC供给的G代码操控功用和刀具半径补偿功用,下降体系的开发周期,进步整个数控体系的实时在线操控功用。
4 数控体系软件规划
操控体系软件是依据Windows 2000体系途径的,用Borland的C + + Builder 6 . 0开发。软件体系选用多使命调度形式开发,依据预订的调度战略调整各功用事情的运转状况。
整个使命体系包括两大模块:体系办理和机床操控,如图4所示。
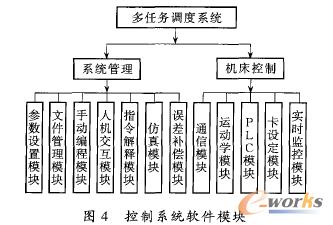
体系办理模块首要完结加工程序的预处理和人机信息交互界面。参数设置模块用于运转软件的参数设置、加工程序的刀具参数设置和机床结构参数设置。文件办理模块用于载人和存储NC加工代码程序文件。手动编程模块可支撑人工NC编程,合适于较简略零件的加工。人机交互模块首要用于各种作业形式的挑选、调试和运转办理,进行数据和指令的输人,反应用户操作信息和体系运转状况。指令解说模块担任对用户的数控操作指令进行解说和处理。仿真模块依照NC加工程序要求完结组织的运动学仿真,进行作业空间校验和运动干与查验。差错补偿模块用于动态加载差错补偿规矩、算法和数据,批改运动操控量,减小加工差错。差错补偿数据可经过专用仪器查看刀尖方位取得,也可对来源于加工进程中的差错进行丈量核算。
机床操控模块担任处理与Turbo PMAC有关的使命。通讯模块用于树立PC与Turbo PMAC之间的数据通讯途径。运动学模块包括组织的运动学改换程序,在体系初始化时该程序被下载到Turbo PMAC的专用存储器中。PLC模块担任将PLC程序下载到Turbo PMAC,完结机床的开关量检测和次序操控功用。卡设置模块完结Turbo PMAC的初始参数装备。实时监控模块用于实时查看Turbo PMAC数据区状况和伺服体系运转状况,并将查看数据传送到人机交互模块,完结刀具轨道和伺服轴运动的模仿显现、操控状况显现和毛病报警指示。
5 结束语
本课题结合新式PRS一XY混联加工途径,规划开发了基一于”PC十多轴运动操控器”架构的敞开式数控系统,直接选用规范G代码NC程序操控零件加工,对用户屏蔽了机床并联结构的运动操控杂乱性。对运动学核算和粗插补功用选用了下载嵌入办法,减轻了主机运转和数据通讯负荷,进步了操控的实时功用和主机的办理功用。软件体系充分使用了Windows途径的资源优势,选用面向对象的规划办法树立友爱的用户操作界面和使命调度体系,使整个体系模块化程度高、可操作性好且功用便于扩展。本文提出的规划思维适用于其他结构类型的并联组织和混联组织的数控体系开发。