深度传感器的三种技能
现在人们假如想勘探环境深度信息,首要依赖于三种技能,分别是相机阵列, TOF(time of flight)技能,以及依据结构光的深度勘探技能。
结构光:
接收器运用激光光源投射方针物,检测反射方针物的变形,以依据几许形状核算深度图。它有必要扫描整个平面以取得需求时刻的深度图,因而它是十分精确的。可是,此办法对环境亮度灵敏,因而一般仅在漆黑或室内区域运用。
飞翔时刻(ToF):
ToF首要有两种办法。第一个很简略:激光源宣布一个脉冲,传感器检测到该脉冲在方针物体上的反射,以记载其飞翔时刻。知道了光的稳定速度后,体系能够核算出方针物体的间隔。为了保证高精度,脉冲周期有必要短,这导致较高的本钱。别的,需求高分辨率的时刻数字转换器,这会耗费许多功率。这种办法一般能够在高功能ToF传感器中找到。
核算时刻的另一种办法是宣布调制光源并检测反射光的相位改变。相变能够经过混合技能简略地丈量。调制激光源比宣布短脉冲更简略,而且混合技能比时刻数字转换器更易于完成。此外,LED可用作调制光源来替代激光。因而,依据调制的ToF体系适合于低本钱ToF传感器。
相机阵列:
摄像头阵列办法运用放置在不同方位的多个摄像头来捕获同一方针的多个图画,并依据几许结构核算深度图。在核算机视觉中,这也称为“立体视图”或“立体”。最简略但最受欢迎的相机阵列是双相机,其间两个相机相隔必定间隔以仿照人眼。关于空间中的每个点,在两个摄像机图画中的方位均呈现可丈量的差异。然后,经过根本几许来核算深度。

相机阵列的首要应战是如安在多个图画中找到匹配点。匹配点查找触及杂乱的CV算法。现在,深度学习能够协助您找到精确度较高的匹配点,可是其核算本钱很高。别的,有许多点很难找到匹配点。例如,在上面的瓦格纳雕像的两个视图中,鼻子是最简略匹配的点,由于它的特征易于提取和比较。可是,关于面部的其他部分(尤其是面部无纹路的外表),很难找到匹配点。当两个相机图画的遮挡不一起,匹配会愈加杂乱。现在,相机阵列作为深度传感器的鲁棒性依然是一个具有应战性的问题。
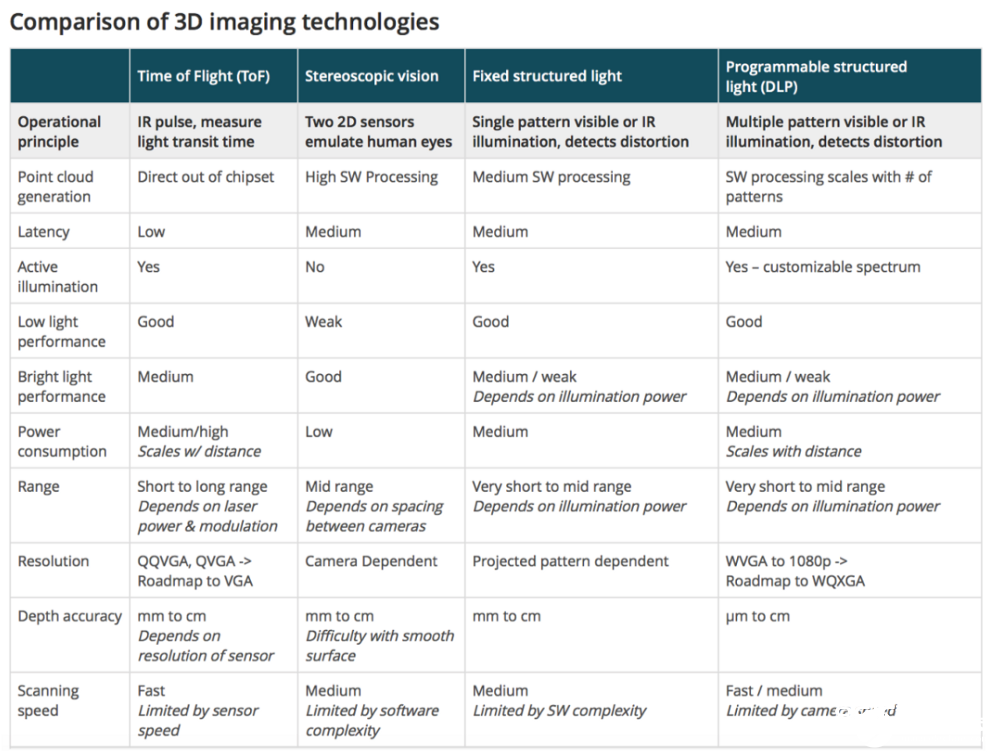
三种深度感测技能的比照
全体体现
关于深度感测,最重要的目标是深度精度。结构光具有最佳的深度精度功能,而相机阵列往往具有最大的深度差错。
就深度感测规划而言,结构光的规划最短,而ToF的规划取决于光源的发射功率。例如,智能设备或许只需求几米的间隔,而自动驾驶轿车则需求几百米。相同,摄像机阵列的丈量规划取决于两个摄像机之间的空间。关于惯例摄像机阵列,最佳功能丈量规划一般在10m左右,虽然也显现了某些具有极窄空间的特别摄像机阵列能够在1m左右丈量深度。
关于深度图分辨率,结构光的功能优于ToF,由于能够精确操控结构发光图画并精确捕获其反射图画。从理论上讲,摄像机阵列具有杰出的分辨率,但这是依据两个图画中的完美点匹配。运用非抱负的点匹配(如润滑外表)时,分辨率会下降。
最终,咱们需求考虑对环境亮度的约束。结构光需求漆黑的环境,而ToF传感器由于快速开展的布景消除技能而能够接受更大规划的环境亮度。关于摄像机阵列,亮堂的环境作用最佳。在漆黑的房间中,相机阵列捕获的图画会变得喧闹,而且比照度变差,因而点匹配变得极为困难,然后导致深度估量不精确。
本钱
摄像机阵列的本钱一般最低,其开发作业首要在软件方面。双摄像头解决计划现已广泛使用于许多智能设备和移动电话中。ToF传感器的本钱适中,而结构光的本钱最高。可是,跟着ToF的批量生产,估计其本钱在不久的将来会大大下降。
可扩展性
经过展望这些技能的潜力,咱们能够更好有利地势用它们来满意未来的需求。
ToF是半导体技能,而且具有最佳的可伸缩性。它的深度精度能够经过片上时刻数字转换器/混合电路进行缩放,其深度图分辨率能够经过传感器尺度进行缩放,其丈量规划能够经过光源功率/调制计划进行缩放,而且其功耗能够经过用半导体技能扩展规划。
另一方面,结构光具有不错的可伸缩性。光学体系是结构光的要害组成部分,光学体系能够跟着封装技能而扩展(虽然不如半导体快)。
最终,缩放摄像机阵列首要依赖于软件:咱们将需求更好的算法来缩放其深度感应功能。它更像是一个数学问题,而不是工程问题,而改善硬件并没有太大协助。即便运用分辨率更高的相机,点匹配问题依然存在。
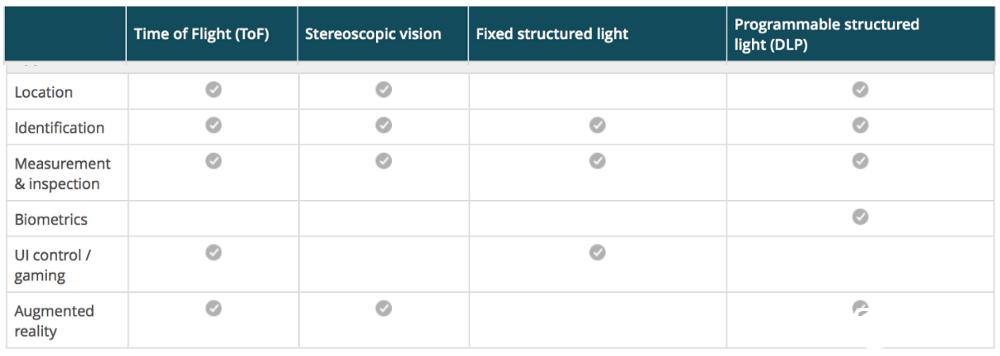
主张仅运用结构光来履行生物辨认使命,由于它具有最佳的深度精度。游戏使用需求中等深度分辨率和快速呼应,因而ToF传感器似乎是最合适的。关于其他使用程序(包含定位,辨认,丈量和增强实际),一切技能都能够做到,可是某些技能比其他技能更适合特定的使用场景。例如,相机阵列或许最适合在需求深度丈量规划的敞开空间中的AR使用,而ToF传感器最适合能够操控环境亮度的室内AR.