


EPS便是英文Electric Power Steering的缩写,即电动助力转向体系。电动助力转向体系是轿车转向体系的发展方向,该体系由电动助力机直接供给转向助力,省去了液压动力转向体系所必需的动力转向油泵、软管、液压油、传送带和装于发起机上的皮带轮,既节约能量,又维护了环境。别的,还具有调整简略、安装灵敏以及在多种状况下都能供给转向助力的特色。正是有了这些长处,电动助力转向体系作为一种新的转向技能,将应战咱们都十分熟知的、已具有50多年前史的液压转向体系。
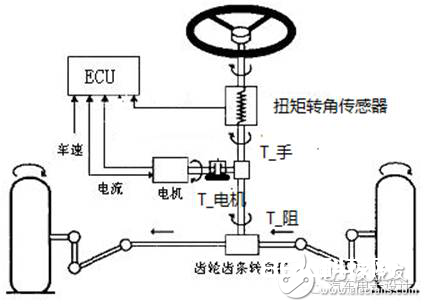
驾驭员在操作方向盘进行转向时,转矩传感器检测到转向盘的转向以及转矩的 巨细,将电压信号输送到电子操控单元,电子操控单元依据转矩传感器检测到的转距电压信号、滚动方向和车速信号等,向电动机操控器宣布指令,使电动机输出相 应巨细和方向的转向助力转矩,然后发生辅佐动力。轿车不转向时,电子操控单元不向电动机操控器宣布指令,电动机不作业。
榜首部分 EPS的操控战略
操控战略无非三个东西:
输入是什么?
对EPS操控战略而言,其根本功用的输入首要是EPS体系内部扭矩转角传感器所供给的方向盘扭矩,方向盘转角,从总线获取的车速信号。
对某些EPS高档功用而言,或许还需要从CAN总线获取车身的侧偏角、横摆角速度、左右前后轮速等车辆动态参数。
驾驭辅佐或自动驾驭,还需要从CAN总线获取比方叠加的力矩值、方针方向盘转角、方针方向盘转速等信号。
输出是什么?
根据输入,通过一些什么样的操控逻辑得到输出?
篇幅所限,这儿只触及EPS根本功用的操控战略,请各位紧记下面的简化公式:T_手+T_电机=T_阻
T_手便是驾驭员操作方向盘所运用的力矩,由扭矩转角传感器丈量得到。
T_阻便是由于轮胎与地上冲突传给齿条的阻力所发生的力矩,转向体系作业的进程便是客服这一阻力矩的进程。
EPS操控战略,其实便是根据各种体系输入条件,核算T_电机的这一进程。至于T_电机是怎样发生的(电机操控范畴范畴)
仔细的观众或许要问,还要用车速做为输入吗?车速在哪里呀车速在哪里?
技能一切的框框里都有一些叫做CURVE或MAP的标定参数,那些烦死人的参数根本都是与车速相关的。
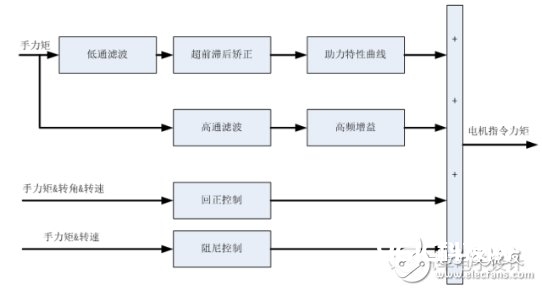
图1:根本的EPS操控模块
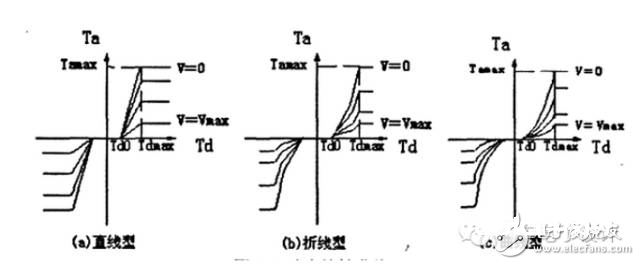
首先是助力特性曲线模块,从EPS创造至今,首要的助力特性曲线通过了从直线、到分段折线、到曲线这么一个进程。直线型助力特性曲线和折线型的助力特性曲线比较简略,简单调试,可是由于助力曲线不是处处可导,不能取得较好的转向手感树立梯度和中心方位感。
超前滞后纠正模块有许多巨大上的叫法,比方安稳补偿器、自适应补偿器等等,其本质都是自动操控原理里边的一个超前滞后纠正的环节。学过自控原理反馈体系根本知识的都知道当一个操控体系前向通道的扩大倍数太大时,必然会导致体系发散不安稳(劳斯安稳性判据和奈奎斯特安稳性判据)。
助力特性曲线,其本质便是前向通道的一个扩大倍数K,不过这个K在不同的车速和不同的手力矩状况下是改变的罢了。当这个K比较大时,就会导致EPS体系发散,很典型的一种状况咱们管他叫“自嗨型EPS”,在不引进超前滞后纠正模块或许超前滞后纠正模块参数没有调理好的状况下,给转向盘略微加一个鼓励,方向盘在或许某一方位不断震动。
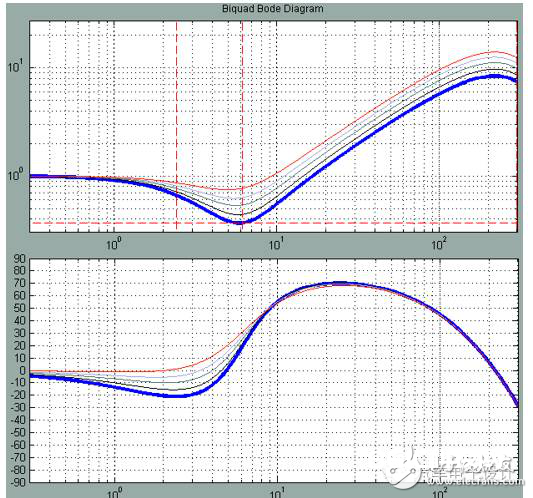
滞后超前模块的引进便是为了消除这一现象而规划,有做两阶补偿的、有三阶补偿的、有四阶补偿的,四阶以上的补偿算法由于参数调理过分杂乱,现在笔者还没有见到过哪家选用。
其规划思路为:
在低频段尽量不影响原体系的幅频和相频特性
在中频段下降体系增益
在高频段进步体系的相频特性,以取得更大的相位裕度
典型的超前滞后纠正模块的BODE图如下:
高频增益模块是独自将手力矩做高通滤波,根据扭矩信号的高频部分通过一个MAP后核算得到一个高频增益力矩。由于做高通滤波必然会带来相位的超前,因而这一部分的力矩对电机惯量及转向体系的内冲突都有必定的补偿作用。

回正操控和阻尼操控是一对互为补充的好基友。没有这两个操控,轮胎及悬置体系自身也可以供给必定的回正力。但一般来说:
在低车速状况下,体系阻力太大,放手时车辆自身的回正力不足以战胜一切的阻力使方向盘回到中位;
在高车速状况下,车辆自身的回正力又太大,放手时又简单呈现摇头的现象。
所以这一对好基友便各司其责,低车速状况下回正操控起作用,供给一个额定的力矩协助方向盘回到中位;高车速的状况下,阻尼操控起作用,供给一个反向的力矩,避免方向盘摇头。终究的方针是共同的,在全车速范围下,能让方向盘精确、平顺的一次性回到中位。
第二部分 EPS架构
德鹏给我的架构的确引起了不少的定见,我这儿做一下阐明。底盘电子的架构,大体以以下为干流架构,单个双核配一个外部MCU。
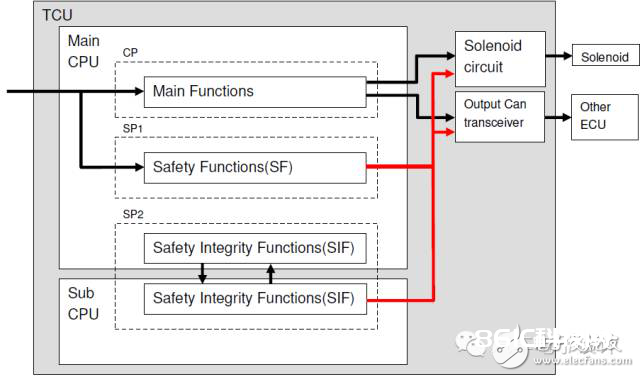
EPS部分,没有、乱动和锁住是三大D级问题
在迈向线控和无人驾驭的范畴,EPS自身一套便是两个以上
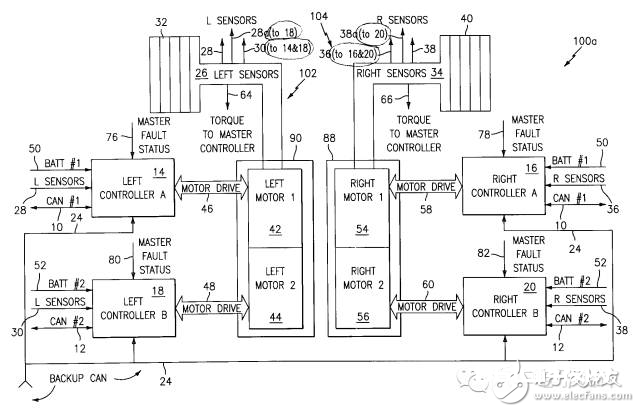
是不是这么夸大,咱们还不知道

小结:
1)在EPS根本功用模块中,助力曲线是根底,纠正高频是要害,回正阻尼如虎添翼。
2)单个EPS甚至2~3个未来咋折腾,看BOM本钱看意图要求,整个规划或许会有一些变数,谁说得理解来说一说






