


0、导言
跟着科技的开展,传统的DDC(Direct Digital Contro1)体系现已无法习惯现代体系的操控要求。集散型操控(Distributed Control System)是处理现代大型体系操控的有用办法,它的本质是运用计算机技能对生产过程进行会集监督、操作、办理和涣散操控的一种新式操控技能,具有通用性强、体系组态灵敏、操控功用完善、数据处理便利、显现操作会集、人机界面友爱、装置简略规范化、调试便利、运转安全可靠等特色。
1、集散操控体系的规划
如图l所示,是以一台计算机为监控总站,下辖多台可编程序操控器PLC,每台PLC又能够一起操控多架升降机,这样就组成了一个大型的集散操控体系。该体系中规划了一个MINI型集散操控体系,选用两台PLC进行操控,每台PLC别离操控一架升降机。在此基础上很简单扩展成一个大型的集散操控体系。
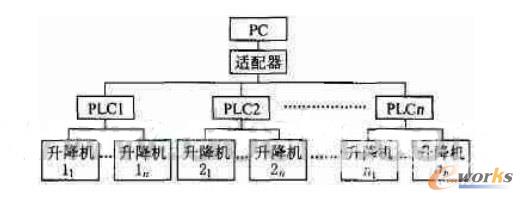
图1 集散操控体系
2、升降机模型规划
升降机结构示意图如图2所示。升降机的支架由铝板加工成“几”字形结构,将直流电机及其驱动电路装置在支架底座的铝板上,把检测轿箱方位的传感器装置在笔直铝板的左侧壁,便于检测到轿箱的方位信号。升降机结构模型,选用直流电机带动滑轮作为主动轮,在升降机支架的上端再装置一个滑轮作为从动轮,用一根棉线拴在两个滑轮之间,带动轿箱上下运动。
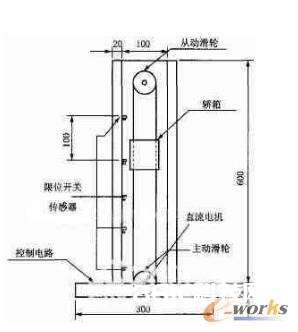
图2 升降机结构示意图
3、PLC对升降机的操控
该规划运用可编程操控器FX2N[1,21,考虑到只规划了外呼叫信号,升降机运转规矩如下(以三层为例):
当轿箱停于一层或二层时,按三层呼叫按钮,则轿箱上升至三层限位开关中止。
当轿箱停于三层或二层时,按一层呼叫按钮,则轿箱下降至一层限位开关中止。
当轿箱停于一层时,按二层呼叫按钮,则轿箱上升至二层限位开关中止。
当轿箱停于三层时,按二层呼叫按钮,则轿箱下降至二层限位开关中止。
当轿箱停于一层,而二层和三层按钮均有人呼叫时,轿箱上升至二楼限位开关时,暂停2 s后,持续上升至三楼限位开关中止。
当轿箱停于三层,而二层和一层按钮均有人呼叫时,轿箱下降至二楼限位开关时,暂停2 s后,持续下降至一楼限位开关中止。
轿箱在上升的过程中,恣意反方向的呼叫无效。反之仍然。
现以轿箱在一楼,二楼三楼都呼叫为例,剖析部分程序如图3中的a)、b)所示:
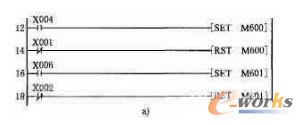
图3 程序剖析图
1) 设置上升时的中心继电器(停电坚持用)
二楼呼叫开关X004有用后,停电坚持继电器M600置位;
轿箱到了二楼后,二楼限位开关X001被触发,M600复位;
三楼呼叫开关X006有用后,停电坚持继电器M601置位;
轿箱到了三楼后,三楼限位开关X002被触发,M601复位。
2) 轿箱在一楼,二楼三楼都呼叫
(1) 停电坚持继电器M600和M601都有用后(二楼、三楼一起有呼叫),输出MO有用(驱动电机正转),而且带自保。直到轿箱到了二楼,二楼限位开关X001触发,才使MO失效;
(2) 轿箱到了二楼,二楼限位开关X001触发时刻继电器TO开端计时2 s;
(3) 2 S后,时刻继电器开关TO闭合,M1有用(驱动电机正转),并自保。直至轿箱到了三楼,三楼限位开关X002触发,才使M1失效。
能够在三菱的编程软件FXGPWIN中画出梯形图,再转换成指令,运用编程线SC09把程序固化到PLC中。
4、PLC与升降机的衔接
楼层限位开关x0、X1、X2及楼层外呼叫按钮x3、X4、X6,作为输入信号,输出为操控直流电机正回转。什物连线如图4所示。

图4 PLC与升降机模型的连线图
在衔接限位开关(GK122)时,运用PLC自带的24 V电源来供电,考虑到点亮发光二极管需求2O mA左右的电流,故在电路中串了一个1 k Q的电阻。直流电机的正回转能够由“H”型电路来完结,当YO、Y4有输出时,电机正转;Y10、Y14有输出时电机回转。
5、MCGS监控界面规划
MCGS (Monitor and Control Generated System,通用监控体系)是一套用于快速结构和生成计算机监控体系的组态软件, 它能够在依据Microsoft的各种32位Windows平台上运转,通过对现场数据的收集处理,以动画显现、报警处理、流程操控和报表输出等多种办法向用户供给处理实践工程问题的计划。
MCGS体系由五大功用模块组成,首要的功用模块以构件的办法来结构,不同的构件有着不同的功用,且各自独立。三种根本类型的构件(设备构件、动画构件、战略构件)完结TMCGS体系三大部分(设各驱动、动画显现和流程操控)的一切作业。
6、PLC与MCGS的通讯衔接
PLC与Pc的连线如图5所示, 选用RS485通讯。图中一台Pc机下辖两台PLC,运用FX一485PC—IF适配器,把PC机过来的RS232C信号转化成RS485信号,通过机能扩展板FX2N 485 BD衔接到PLC,再衔接到升降机。另一并联支路中的FXON一485ADP和FX2N-CNV-BD所完结的功用和FX2N-485-BD相同。按这种办法构成的体系,最多可设l6个子站,当只用适配器时,可延长距离500 m,如运用机能扩展板则为50 m。
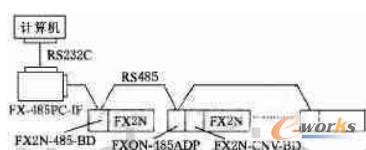
图5 PLC与PC的衔接
RS485的连线可所以一对或两对导线。依据用处来决议连线的办法,本规划选用的是两对导线衔接办法。
为了树立PLC与MCGS的通讯衔接,能够在PLC编程软件FKGPWIN的菜单“PLC/串行口设置” 中设置通讯地址和通讯参数,也能够在软件中直接用编程(MOV指令)来完结,按RS485规则详细设置是:
波特率设为9 600 bit/s,数据位设为7位,l位开始位,2位中止位,偶校验,选用协议1。用编程软件设置如图6:

图6 编程软件设置
其间在D8121中设置通讯地址,两架升降机的地址别离设为0和l,在D8120中设置通讯参数。一起在MCGS的设备窗口中也要进行相同的设置,才干树立通讯衔接。
进一步还要树立PLC的输入、输出量与MCGS的数据库中对应变量的通道衔接,这样才干完结升降机什物模型与监控界面中的升降机同步运动,由于数据是同步收集的。
7、调试
通过调整直流电机的供电电压和MCGS中守时器的守时循环时刻,MCGS监控画面中的升降机现已能够和PLC操控的升降机什物同步运转并施行监控。
8、定论
该规划尽管仅仅个MINI型集散操控体系,但它能够很简单的扩展成一个大型的集散操控体系,具有很强的通用性。跟着操控规模的扩展,操控要求的进步,集散操控逐渐成为自动操控领域中很重要的一种操控办法。尤其是与PLC结合在一起,再运用具有强壮同步监控功用的MCGS组态软件进行实时监控,更是具有宽广的使用远景。






