


1、 导言
步进电机是把脉冲信号转换成角位移或直线位移的履行元件,是一种输出与输入数字脉冲相对应的增量驱动元件。具有定位精度高、惯性小、无堆集差错、发动性能好、易于操控、价格低廉及与计算机接口便当等长处,被广泛应用于数控体系中。计算机技能的开展,促进了数字操控技能的开展。步进电机细分驱动技能能够减小步进电机的步距角,进步电机运转的平稳性,添加操控的灵活性等。使用FPGA中的嵌入式EAB能够构成寄存电机各相电流所需的操控波形表,再使用数字比较器同步发生多路FPGA电流波形,对多相步进电机进行操控。若改动操控波形表的数据、添加计数器和比较器的位数,进步计数精度,就能够进步PWM波形的细分精度,进而对步进电机的步进转角进行恣意级细分,完结转角的准确操控。
2 、步进电机细分驱动的基本原理
步进电机的驱动是靠给步进电机的各相励磁绕组轮流转以电流,完结步进电机内部磁场组成方向的改动来使步进电机滚动的。即改动一次通电状况,转子转过一个步距角。该步距角的计算公式为:
其间:α代表接入绕组的线路状况数,m代表电动机的相数,Z r代表转子齿数。由此可见,步进电机一旦制造出来,其相数与转子齿数将为定值,要想减小步距角,以到达细分的意图,用户能改动的只要α。
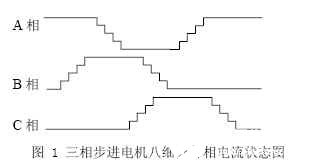
在无细分的步进电机驱动体系中,经过各相绕组的电流幅值是不改动的,仅在各相通电状况改动时,α值才相应地改动。如关于三相步进电机来说,单三拍或双三拍运转时,α = l ;单双六拍运转时,α=2。假如要想增大α,有必要使绕组中的电流按阶梯上升和下降,即在零与最大相电流之间有多个安稳的中心电流状况。图1所示为三相六拍四细分时各相电流波形,各相电流均以最大电流值的1/4上升和下降。与单双六拍办法比较,α值从2添加到8,步距角θb为三相六拍运转办法时的1/4。所以步进电机细分驱动的关键在于操控电机各相励磁绕组中的电流巨细及其安稳性。
改动步进电机相电流转常选用电流矢量恒幅均匀旋转的细分办法来完结,即一起改动两相电流iA和iB的巨细,使电流组成矢量等幅均匀旋转。iA和iB的改动曲线可描绘为:
iA = imcosx
iB = imsinx
三相步进电机八细分时的各相电流是以1/4的步距上升或下降的,在两相安稳的中心状况,本来一步所转过的视点将由八步完结,完结了步距角的八细分。
3、 依据FPGA的硬件完结
为了对步进电机的相电流进行操控,然后到达细分步进电机步距的意图,人们曾规划了多种步进电机的细分驱动电路。开始对电机相电流的操控是由硬件来完结的。这种细分驱动电路线路杂乱,本钱高,缺少柔性,因而现很少选用。
跟着大规模集成电路FPGA/CPLD的开展,为步进电机的细分驱动带来了便当。选用EDA技能进行操控规划,可依据细分要求的步距角计算出各项绕组中经过的电流,存储在FPGA的嵌入式ROM中。细分操控时,地址计数器主动发生地址送到LPM-ROM,依据不同的地址,LPM-ROM给出相应的数据到数字比较器,与线性锯齿波比较后输出PWM波形,操控功放电路给各相绕组通以相应的电流,完结步进电机的细分驱动。
3.1 体系构成
从图1中能够看出,一般状况下总有二相绕组一起通电。一相电流逐步增大,另一相逐步减小。对应于一个步距角,电流能够改动N个台阶,也便是电机方位能够细分为N个小视点,这便是电机的一个步距角被N细分的作业原理。也能够说,步距角的细分便是电机绕组电流的细分,然后可驱动步进电机滑润运转。
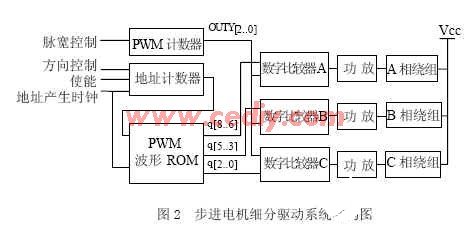
图2为步进电机细分驱动体系结构图。步距细分电路是由PWM计数器、ROM地址发生器、PWM波形存储器、比较器、功放电路所组成。其间,PWM计数器在时钟脉冲作用下递加计数,发生阶梯形上升的周期性锯齿波,一起加载到三相步进电机各相数字比较器的一端;波形ROM输出的数据q[8..6]、q[5..3]、q[2..0]别离加载到比较器的另一端。当PWM计数器的计数值小于波形ROM输出数值时,比较器输出高电平;而当大于波形ROM输出值时,比较器输出低电平。由此可输出周期性的PWM波形。依据图1步进电机八细分电流波形的要求,将各个时间细分电流波形所对应的数值寄存于波形ROM中,波形ROM的地址由地址计数器发生,地址计数器有3个操控端,可用于改动步进电机的旋转方向、滚动速度、作业/中止状况。FPGA以发生的PWM信号操控驱动电路的导通和关断。PWM信号随ROM数据而改动,改动ROM中的数据就能够改动输出信号的占空比,完结限流及细分操控,最终使电机绕组电流出现阶梯形改动,然后到达步距细分的意图。
3.2 PWM操控电路
图3为步进电机PWM操控电路。CNT4是四进制计数器,构成PWM计数器,将整个PWM周期分红4等份,发生阶梯形上升的周期性锯齿波,一起加载到三相步进电机各相数字比较器的一端;CNT24是二十四进制计数器构成ROM地址发生器,计数器的up_down为方向操控,ENA为使能操控,clk_js速度操控,能够经过up_down、ENA和clk_js操控步进电机的旋转方向、作业/中止和旋转速度;ROM是宽度为9位,深度为32位的存储器,寄存了各个时间细分电流波形所对应的数值;COMPARE为数字比较器,用于ROM输出的数据和PWM计数器计数值的比较。
输出细分电流信号选用FPGA中ROM查表法,它是经过在不同地址单元内写入不同的PWM数据,用地址挑选来完结不同通电办法下的可变步距细分。从ROM输出的数据加在比较器的“+”端,PWM计数器的计数值加在比较器的“-”端,当计数值小于ROM数据时,比较器输出高电平;当计数值大于ROM数据时,比较器则输出低电平。假如改动ROM中的数据,就能够改动一个计数周期中高低电平的份额。

4、 仿真、测验成果剖析
图4是三相步进电机PWM仿真波形图,图中展现了FPGA操控步进电机的状况。ROM输出的9位数据q[8..0]为八进制,作为步进电机各相电流的参考值,每3位二进制(l位八进制)数值操控一个相,别离用于操控步进电机A、B、C三相的作业电流。关于每一相来说,当输出数据为0时,该相电流为0;输出数据为1时,脉宽高电平占一个PWM周期的1 / 4; 当输出数据为2时,脉宽高电平占一个PWM周期的2/4;当输出数据为4时,整个PWM周期均输出高电平。PWM输出电流的均匀值与旋转视点成正比[4]。
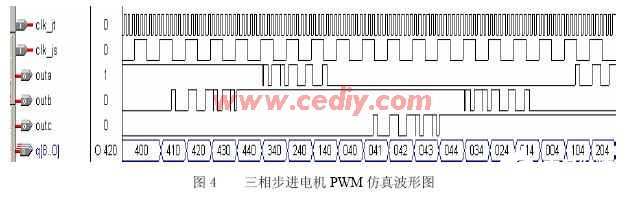
图4中也给出了步进电机从A-》AB-》B-》BC-》C-》CA-》A三相六拍作业进程的仿真波形。首要,步进电机A相导通,B、C相截止,q[8..0]输出数据为400;A相的数据为4,其他相的数据为0。然后逐步过度到AB相导通,q[8..0]输出数据为410-》420-》430-》440, B相的数据逐步增大,从1增大到4。电机中的磁场经过4拍,从A相转到了AB相。再经过4拍,从AB相转到B相;q[8..0]输出数据为340-》240-》140-》040, A相的数据逐步减小,从4变为0。从A到AB到B共经过了8拍,完结了步距角的8级细分。此外因为步进电机是电感性负载,对输出的PWM电流具有滑润滤波作用,对电机线圈起作用的是PWM的均匀电流,因而在作用大将图中的细微毛刺电流滤除。
5、 定论
经过使用FPGA中嵌入式EAB构成的LPM-ROM寄存电机转角细分电流所需的数据表,由数字比较器同步发生多路PWM电流波形,对多相步进电机的转角进行均匀细分,有效地操控步进电机。若进步波形表数据的位数,添加计数器和比较器的位数,就能够进步PWM波形的细分精度,对步进电机的步进转角进行恣意细分,完结步进转角的准确操控。此完结办法比现在单片机加D/A的操控计划愈加高效。
本文作者立异点:经过使用FPGA中嵌入式EAB构成的LPM-ROM寄存电机转角细分电流所需的数据表,由数字比较器同步发生多路PWM电流波形,对多相步进电机的转角进行均匀细分,有效地操控步进电机。
责任编辑:gt






