


1 导言
电力电子技能的首要任务为完成电能的转化,它的首要研讨方针是节能,尽力发掘全部潜在的进步功率的途径,来节省有限的动力,保护人类生计的环境。功率改换技能正是完成这一方针的重要手法,所以它始终是电力电子学的核心技能。经过三十多年,特别是近十多年的开展,功率改换技能已比较老练,近年来的开展意向首要会集在软开关、高压、大功率和低压、大电流改换技能方面。
近年来沟通异步电机的调速运用得到较快的开展,与沟通异步电机比较较,同步电机有着先天的优势,异步电动机因为励磁的需求,有必要从电源汲取滞后的无功电流,空载时功率因数很低。而同步电动机则可经过调理转子的直流励磁电流,改动输入功率因数,能够滞后,也能够超前。当cosθ=1时,电枢铜损最小,还能够节省变压变频设备的容量。因为同步电动机转子有独立励磁,在极低的电源频率下也能运转,因而,在相同条件下,同步电动机的调速规模比异步电动机更宽。异步电动机要靠加大转差才干进步转矩,而同步电机只须加大功角就能增大转矩,同步电动机比异步电动机对转矩扰动具有更强的承受能力,能作出更快的动态呼应。因为沟通同步电机在可靠性与保护量、功率因数、电机尺度与转动惯量、操控精度、弱磁比等方面有其本身的优势,关于大容量电机,世界各国已根本趋向于运用同步电机。比方工业运用上大功率空气压缩机、水泵、煤炭与有色金属职业中的大功率提升机和钢厂大容量轧钢机等均选用同步电机驱动。
沟通同步电机的调速是电气驱动范畴的一大难题,我国从20世纪70年代开端进行沟通同步电机调速技能的研讨,80年代初已研制成功交—交变频同步电机的试验样机,但大功率沟通变频调速设备直到90年代后期才得到开展。现在国产大功率变频设备成功运用于同步电机的实例很少,都是国外品牌统一天下。现在我国大型同步电机运用变频调速尽管刚刚起步,但国外现已广泛运用。经过他们长时间的运转实践标明:运用高压大功率变频调速体系的经济效益杰出、其可靠性也能够得到确保。因而我国高压同步电机变频调速设备将来的市场前景巨大。
国内大功率沟通同步电机传动方面,以交-交变频调速传动为主。这些变流、变频传动设备功率大,一般为几百千瓦至数千千瓦。在水泥,采矿与矿山职业、船只职业、冶金职业、化工,石油与天然气职业、电力职业、纸浆造纸职业、供水与污水处理、煤炭、有色金属等特别是矿山的大型矿井提升机传动与调速等范畴已有较多的运用。大容量、低转速、高过载、呼应快、四象限运转等传动范畴首要用于矿井提升机和钢铁厂的主轧机,对变频器的操控要求特别严厉,这是一般异步电机及其变频器所不能处理的,在此类体系中运用的大多是大功率同步电机。我国现在在高压大功率同步电机操控体系中选用的技能首要以交-交操控办法的变频为主,还有交-直-交办法,交-交变频器因为其操控原理办法的约束,形成其功用和运用规模受限。交-交变频器的结构办法把电网频率的沟通电变成可调频率的沟通电,归于直接变频电路,广泛用于大功率沟通电动机调速传动体系。改动切换频率,就可改动输出频率;改动沟通电路的导通角,就能够改动沟通输出电压幅值;输出频率增高时,输出电压一周期所含电网电压段数削减,波形畸变严峻,电压波形畸变及其导致的电流波形畸变和转矩脉动是约束输出频率进步的首要因素。输出波形畸变和输出上限频率的联系,很难确认清晰边界。例当选用6脉波三相桥式电路时,输出上限频率不高于电网频率的1/3~1/2。电网频率为50hz时,交-交变频电路的输出上限频率约为20hz。
还有一种变频器是交-直-交型高压变频器,这种变频器的驱动高压同步电机的办法现在以v/f操控为主,这种办法在一些对调速比要求不高,动态呼应低的场合适用,它的操控办法是选用异步电机的操控战略,发动进程:高压同步电机先进行异步变频发动,等转速挨近同步转速时,再对转子投入励磁电流,使体系进入同步转速运转。这种操控办法的缺陷是,呼应慢,调速比小, 不能发挥同步电机的专长,不能完成四象限运转,高压同步电机输出的转矩低,起动电流大,简单失步,这种变频器只能用于负载较轻,负载改动不大的场合。
跟着微电子技能的开展和运用,核算机用于操控,使沟通变频操控体系由模拟式进入数模混合式,进一步开展到全数字式,完成操控计划和操控战略的软件化,在操控体系全数字化的情况下,因为改动软件即可改动操控方式和参数,这就大大进步了体系的通用性和灵活性,简化了体系的硬件结构,并可选用一些依据现代操控理论的操控算法来进步体系的功用。更重要的是,跟着现代通讯技能、长途操控技能、总线技能和自动化技能的开展,全数字办法是未来开展的必然趋势。因而全数字化交-直-交大功率同步电机矢量操控器的运用是未来运用的方向,这方面在我国的运用和研讨仍是空白,变频调整操控办法的开展首要体现在由前期的静态操控办法向高动态功用的四象限运转的矢量操控开展,选用这种操控办法能够有效地处理高压同步电机的动态呼应、调速比宽等要求,体系能够恒转矩输出。
2 全数字化矢量操控办法技能计划的原理
2.1技能计划具体论述
鉴于现有技能缺陷,和要完成的技能意图,咱们要完成的高压同步电机矢量操控变频器的完成由以下技能特色和单元组成,三相高压电输入移相阻隔变压器,经移相阻隔降压多路沟通输出后,输入到带能量回馈的功率单元igbt整流并滤波成直流再经igbt逆变输出到同步电机;电机的方位速度传感器反应的信号经高速串行编码传输办法传送给主控板的fpga进行解码处理后,送给dsp进行数据运算处理;电流反应经霍尔传感器采样,上传信号板经模拟信号处理电路滤波处理后再上传给dsp主控板的ad采样并运算;主控板与上位机的人机界面进行实时数据通讯,并上报体系的各项运转参数和毛病状况;输入输出信号单元板与主操控器进行通迅,处理外部输入输出信号的操控功用;体系的原理如图1所示。

2.2交-直-交单元串联多电平办法
现在国内的同步电机变频器,大部分选用的是交-交变频,和交-直-交变频器比较,缺陷:驱动晶闸管杂乱;输出频率规模低,只能到达电网频率得1/3运转;功率因数低,谐波污染严峻。在一些操控场合,交-交变频器的原理带来了它在高速上的运用不能完成和动态呼应慢的缺陷。
交-直-交办法运用移相的意图能够进步整流设备的脉波数,减小网侧高次谐波,整流变压器选用二次侧延边三角形移相,交-直-交办法频率调速规模宽,功率改换电路选用多电平改换器,如图2所示,各级功率模块均选用h全桥igbt驱动办法,因为输出电平数较多,输出波形阶梯增多,就能够使调制波挨近正弦,下降电压跳变,这样谐波就少。另一个长处是输出电压的dv/dt较小,对负载电机的冲击小。如一些轧钢机,提升机,卷扬机。假如选用交-交变频,有必要加减速组织。而交-直-交变频器能够在设备答应的规模内,其频率恣意调理,这就处理了上述问题。
2.3依据能量回馈的功率单元
一般高压变频器不能直接用于需求快速起、制动和频频正、回转的调速体系,如高速电梯、矿用提升机、轧钢机、大型龙门刨床、卷绕组织张力体系及机床主轴驱动体系等。因为这种体系要求电机四象限运转,当电机减速、制动或许带位能性负载重物下放时,电机处于再生发电状况。因为二极管不控整流器能量传输不可逆,发生的再生电能传输到直流侧滤波电容上,发生泵升电压。而以gtr、igbt为代表的全控型器材耐压较低,过高的泵升电压有或许损坏开关器材、电解%&&&&&%,甚至会损坏电机的绝缘,然后要挟体系安全作业,这就约束了一般高压变频器的运用规模,而依据能量反应的体系处理了上述问题,而且完成了真实的节能方针而不是糟蹋掉能量。
带能量回馈的功率单元,输入为移相阻隔变压器副边降压绕组的三相,igbt的操控信号为经光纤传输过来的pwm信号操控其导通和关断,输出经单元串联后到电机。原理图如图2所示。

2.4数字矢量操控办法
矢量操控的意图是为了改进转矩操控功用,而终究施行仍然是对定子电流的操控。因为在定子侧的各物理量(电压、电流、电动势、磁动势)都是沟通量,其空间矢量在空间以同步转速旋转,调理、操控和核算均不便利。因而,需借助于坐标改换,使各物理量从停止坐标系转化到同步旋转坐标系,站在同步旋转的坐标系上调查,电动机的各空间矢量都变成了停止矢量,在同步坐标系上的各空间矢量就都变成了直流量,能够依据转矩公式的几种方式,找到转矩和被控矢量的各重量之间的联系,实时地核算出转矩操控所需的被控矢量的各重量值——直流给定量。按这些给定量实时操控,就能到达直流电动机的操控功用。因为这些直流给定量在物理上是不存在的,是虚拟的,因而,还有必要再经过坐标的逆改换进程,从旋转坐标系回到停止坐标系,把上述的直流给定量改换成实践的沟通给定量,在三相定子坐标系上对沟通量进行操控,使其实践值等于给定值。在矢量改换的操控办法中,需用到停止和旋转的坐标系,以及矢量在各坐标系之间的改换,沟通同步电机的矢量操控,需求把电机的abc三相定子停止坐标系的电流ia、ib、ic、改换成α和β两相停止坐标系(clarke改换),也叫三相-二相改换,再从两相停止坐标系改换成同步旋转磁场定向坐标系(park改换),等效成同步旋转坐标系下的直流电流iq、id(id相当于直流电动机的励磁电流;iq相当于与转矩成正比的电枢电流),然后仿照直流电动机的操控办法,求得直流电动机的操控量,经过相应的坐标逆改换(park逆改换)(clarke逆改换),完成对同步电动机的操控。其实质是将沟通电动机等效为直流电动机,分别对速度,磁场两个重量进行独立操控。经过操控转子磁链,然后分化定子电流而取得转矩和磁场两个重量,经坐标改换,完成正交解耦操控。
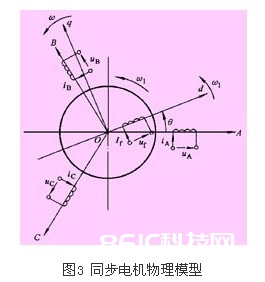
如图3所示,二极同步电机的物理模型,定子三相绕组轴线a、b、c是停止的,三相电压ua、ub、uc和三相电流ia、ib、ic都是平衡的,转子以同步转速ω1旋转,转子上的励磁绕组在励磁电压uf供电下流过励磁电流if。沿励磁磁极的轴线为d轴,与d轴正交的是q轴,d-q坐标在空间也以同步转速ω1旋转,d轴与a轴之间的夹角θ为变量。






