CAN[Control(Controller) Area Network]是操控(器)局域网的简称。CAN是一种有用支撑分布式操控或实时操控的串行通讯网络,开端由德国Bosch公司80年代用于轿车内部测试和操控仪器之间的数据通讯。现在CAN 总线规范已被世界规范化安排ISO制订为世界规范ISO11898,并得到了Motorola,Intel ,Philips等多半导体器材出产厂家的支撑,敏捷推出各种集成有CAN协议的产品。现在CAN总线首要用于轿车主动化范畴,如发动机主动焚烧、注油、杂乱的加快刹车操控(ASC)、抗确定刹车体系(ABS)和抗滑体系等。BENZ、BMW等闻名轿车上现已选用CAN来满意上述功用。在工业进程操控范畴,CAN也得到了广泛的运用。
1.1.1 CAN协议 CAN总线选用分层结构,规范规则了恣意两个节点之间的兼容性。包含电气特件利数据解说协议。
CAN协议可分为:方针层、传送层、物理层。其间方针层和传送层包含了ISO/OSI界说的数据链路的一切功用。方针层的功用包含:承认要发送的信息;位运用层供给接口。传送层功用包含:数据帧安排:总线裁定:检错、过错报告、过错处理。
CAN总线以报文为单位进行信息交流,报文中含有标明符(ID),它既描绘了数据的意义又标明晰报文的优先权。CAN总线上的各个协点都可主动发送数据。当一起有两个或两个以上的节点发送报文时,CAN操控器选用ID进行裁定。ID操控节点对总线的拜访。发送具有最高优先权报文的节点取得总线的运用权,其他节点主动中止发送,总线闲暇后,这些节点将主动重发报文。
CAN支撑四类信息帧类型。
(1)数据帧 CAN协议有两种数据帧类型规范2.0A和规范2.0B。两者实质的不同在于ID的长度不同。在2.0A类型中,ID的长度为l l位;在2.0B类型中ID为29位。一个信息震中包含7个首要的域: 帧开端域——标志数据帧的开端,由一个显性位组成。裁定域——内容由标明符和长途传输恳求位(RTR)组成,RTR用以标明此信息帧是数据帧仍是不包含任何数据的远地恳求帧。当2.0A的数据帧和2.0B的数据帧必须在同一条总线上传输时,首要判别其优先权,假如ID相同,则非扩展数据帧的优先权高于扩展数据帧。操控域——r0、r1是保存位,作为扩展位,DLC表明一帧中数据字节的数目。 数据域——包含0~8字节的数据。校验域——检验位错用的循环冗余校验域,共15位。应对域——包含应对位和应对分隔符。正确接纳到有用报文的接纳站在应对期间将总线值为显性电平。 帧完毕——由七位隐性电平组成。
(2)长途帧承受数据的节点可经过发长途帧恳求源节点发送数据。它由6个域组成:帧开端、裁定域、操控域、校验域、应对域、帧完毕。
(3)过错指示帧由过错标志和过错分界两个域组成。接纳节点发现总线上的报文有误时,将主动宣布“活动过错标志”其他节点检测到活动过错标志后发送“过错认可标志”。
(4)超载帧由超载标志和超载分隔符组成。超载帧只能在一个帧完毕后开端。当接纳方接纳下一帧之前,需求过多的时间处理当时的数据,或在帧问空地域检测到显性电平常,则导致发送超载帧。
(5)帧间空地坐落数据帧和远地帧与前面的信息帧之间,由帧间空地和总线闲暇状况组成。帧间空地是必要的,在此期间, CAN不进行新的帧发送,为的是CAN操控器在下次信息传递前有时间进行内部处理操作。当总线闲暇时CAN操控器方可发送数据。
1.1.2电气参数及信号表明
总线上的数据选用不归零编码方法(NRZ),可具有两种互补的逻辑值之一:显性及隐性。CAN总线中各节点运用相同的位速率。它的每位时间由同步段、传达段、相位缓冲段1及相位缓冲段2组成。发送器在同步段前改动输出的位数值,承受器在两个相位缓冲段间采样输入位值,而两个相位缓冲段长度可自在调理,以确保采样的可靠性。别的,CAN总线选用时钟同步技能来确保通讯的同步。
1.2 CAN的首要技能特色
CAN网络上的节点不分主从,任一节点均可在恣意时间主动地向网络上其他节点发送信息,通讯方法灵敏,使用这一特色可便利地构成多机备份体系,CAN只需经过报文滤波即可完结点对点、一点对多点及大局播送等几种方法传送接纳数据,无需专门的”调度” CAN的直接通讯间隔最远可达10km(速率5kbps以下);通讯速率最高可达1Mbps(此刻通讯间隔最长为40m)。 CAN上的节点数首要决定于总线驱动电路,现在可达110个;报文标识符可达2032种(CAN2.0A),而扩展规范(CAN2.0B)的报文标识符几乎不受限制。
1.3 CAN总线通讯体系拓扑结构
CAN在物理结构上归于总线式通讯网络。体系的组成如下图:
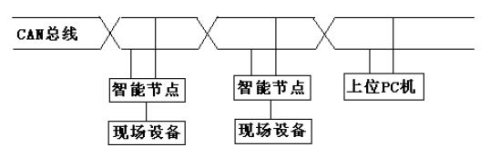
图1 CAN总线体系结构图
该体系由上位监控PC机、智能节点和现场设备三部分组成。上位监控PC机首要担任对体系数据的承受与办理、操控指令的发送以及各操控单元动态参数和设备状况的实时显现;智能节点能够使现场设备便利地衔接到CAN总线上,首要担任对现场的环境参数和设备状况进行监测,对收集来的数据进行打包处理并将处理后的数字信号经过CAN通讯操控器SJA1000发送到CAN总线。智能节点的规划和挑选,对通讯信号的传输发送有很的影响,体系中的数据传送和接纳,都是经过CAN总线接口完结。CAN总线接口电路的规划,对CAN总线很是重要。本文正是基于此,对CAN总线接口电路进行规划剖析,给出一种规划计划。
2 CAN总线接口电路规划
2.1 整体计划规划
CAN 总线接口电路首要包含:单片机、操控器接口、总线收发器和看门狗电路等。选用Philips公司出产的SJA1000操控器和与其配套的82C250CAN收发器。依照CAN总线物理层协议挑选总线介质,规划布线计划,衔接成CAN网络。双绞屏蔽线可设两套,在两套介质上一起进行信息传输,接纳方只用一个介质。在冗余和非冗余段的衔接临界点处进行总线切换。
硬件电路的规划首要是CAN 通讯操控器与微处理器之间和CAN总线收发器与物理总线之间的接口电路的规划。CAN通讯操控器是CAN总线接口电路的中心,首要完结CAN的通讯协议,而CAN总线收发器的首要功用是增大通讯间隔,进步体系的瞬间抗搅扰才能,维护总线,下降射频搅扰(RFI),完结热防护等。看门狗电路首要是完结对电路的监控和复位效果。
现在广泛盛行的CAN总线器材有两大类:一类是独立的CAN操控器,如82C200、SJA1000及Intel82526/82527等,另一类是带有在片CAN的微操控器,如P8XC582及16位微操控器87C196CA/CB等。本课题选取PHILIPS公司的SJA1000 CAN操控器以及82C250总线收发器,首要是考虑到SJA1000支撑CAN 2.0A/B规约。而82C250能够支撑110个CAN节点,并且国内市场上PHILIPS的产品类型比较多,购买比较便利。在本次规划中,接口电路简略表明如下图:

图2-1 接口电路整体框图
2.2 各模块电路的规划
2.2.1单片机最小体系
本规划中,运用到单片机为ATMEL公司51系列的89C51,该类型的单片机运用广泛,技能老练,市场上价格便宜,并且在学习中所学到的多为该类型,在本次规划中是首选的芯片。89C51单片机作为体系的中心操控部分,但在本规划中不是要点解说内容,其相关技能运用和引脚特色功用等,可参照其他相关材料。规划的电路原理方框大致如下图2-2所示。
规划中为防止呈现时钟信号的抵触,对单片机的外接晶振引脚XTAL1、XTAL2不接上外围电路,而是经过操控器SJA1000的时钟信号脚反馈给单片机。一起,对单片机的复位信号处理,RST引脚接上X5045P的RST脚,复位信号可由X5045P输出,在X5045P芯片看门狗外围电路的效果下,减少了以往由电阻、%&&&&&%组成的简易复位电路形成的不精确、延时高级不良效果,使单片机回复到初始状况,完结复位操作。因为在该电路中要用到单片机的存储效果,存储由SJA1000传输过来的处理数据。因而,脚/EA接上高电平,选用片内ROM。对ALE脚,也即地址锁存有用信号除数端是和操控器SJA1000的ALE脚接通。
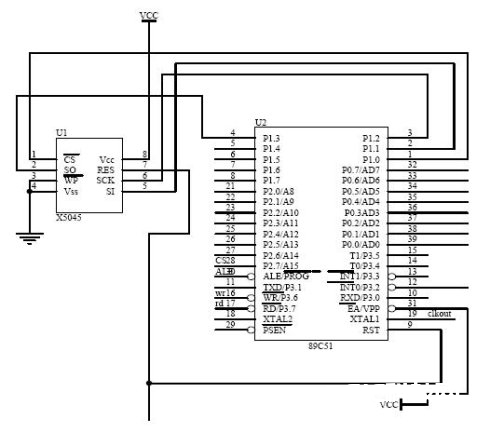
图2-2 单片机最小体系
2.2.2 CAN总线接口操控电路规划
SJA1000 在电路中是一个总线接口芯片,经过它完结上位机与现场微处理器之间的数据通讯。该电路的首要功用是经过CAN总线接纳来自上位机的数据进行剖析组态然后下传给下位机的操控电路完结操控功用,当CAN总线接口接纳到下位机的上传数据,SJA1000就发生一个中止,引发微处理器发生中止,经过中止处理程序接纳每一帧信息并经过CAN总线上传给上位机进行剖析。AT89C51是CAN总线接口电路的中心,其承当CAN操控器的初始化、CAN的收发操控等使命。
声明:本文内容来自网络转载或用户投稿,文章版权归原作者和原出处所有。文中观点,不代表本站立场。若有侵权请联系本站删除(kf@86ic.com)https://www.86ic.net/fangan/dianlu/233588.html









