1.导言
并联有源电力滤波器(SAPF)是动态补偿三相电力体系中谐波和无功的重要设备,因为电网中的谐波电流成分非常杂乱,因而其功用首要取决于谐波电流的盯梢速度及盯梢精度。现在,传统的电流操控算法有滞环操控、PI 操控、无差拍操控等。滞环操控具有较快的动态呼应速度,易完成,但开关频率不固定,易构成过大的脉动和开关噪声;PI 操控能够取得固定的开关频率,但其带宽不行宽,对APF 这种谐波给定会存在稳态静差不行消除的缺陷;无差拍操控能快速呼应电流的忽然改变,特别合适快速猜测谐波电流的改变趋势,但核算量很大,对猜测模型的依赖性较大,因算法杂乱导致猜测周期增大然后引起较大的猜测差错,终究影响补偿作用。
为进步SAPF 的操控功用及对非周期信号的抗搅扰性,本文在同步旋转d、q 坐标系系下将直接重复操控进行改善,与传统的PI 操控相结合,组成PI 操控内环,改善重复操控外环的双闭环操控。一起,将SVPWM 操控战略引进操控算法之中,与传统的
SPWM 比较,SVPWM 矢量操控不只减少了开关器材的开关次数,下降了开关损耗,一起进步了直流电压的使用率,使APF 在较低的直流母线电压下,完成了较好的操控作用。
2.SAPF 旋转D-Q 坐标系下的数学模型及操控办法

并联型有源电力滤波器的结构图如图1 所示.其间eg 为电网电源,lg 为电网等效漏感;L 为APF 沟通侧电感,R 为电感内部等效电阻; 1a i , 1b i , 1c i 是三相负载电流; sa i , sb i 和sc i 是三相电源输出电流; ca i , cb i 和cc i是三相APF 输出电流; a V , b V 和c V 别离是APF 沟通侧三相输出电压, dc u 为直流电压。依据图1 能够写出APF 的体系微分方程:


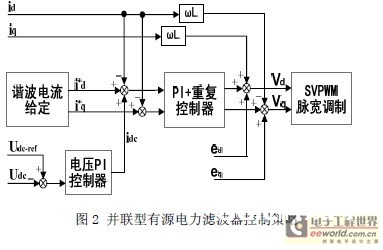
此刻,APF 操控战略结构图如图2 所示,包含电流和电压2 个操控环。其间,外环是电压环,采纳惯例的PI 操控,它的作用是确保APF 的直流电压安稳,使电流内环能够有用地补偿谐波和无功电流。内环是电流环,选用旋转坐标系下结合了PI 和重复操控的复合操控器,它的功用是使APF 输出与谐波源相反的谐波电流。
3.依据重复操控和PI 操控的复合操控战略
3.1 直接重复操控战略
重复操控是一种依据内模原理的操控战略,内模原理指出,体系安稳状况下,精确盯梢恣意参阅输入信号的前提条件是:闭环操控体系安稳且包含有输入信号坚持器。从理论视点看,内模的作用相似无穷大增益的操控信号坚持器,当差错衰减到零时,它仍能保持恰当的操控作用。关于APF 来说,假如要树立一切谐波信号的内模显然是不现实的,但因为一切谐波信号都是周期性的,而基波周期为谐波周期的整数倍,所以一切谐波信号的周期都能够取成基波周期,这时就能够用重复操控来结构一个基波周期的恣意次谐波信号的内模。其内模模型能够用以下公式表明[5][10],
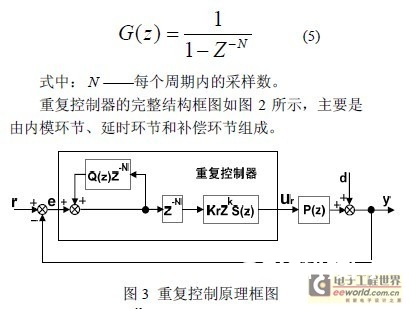
图中,Q( z) Z−N 为体系内模,Q(z)为一低通滤波环节或小于1 的常数。周期延时环节Z −N 使操控信号输出延时一个基波周期。补偿环节S (z)是依据体系模型P( z)的特性规划的,包含幅值补偿Kr、相位补偿Z k 和用于改善被控目标特性的补偿器S (z)。补偿环节S (z) 的首要意图是在取得了上一周期的差错信号后,鄙人一周期发生恰当的操控量。

3.2 改善的复合操控
APF 自身输出的便是谐波电流,给定谐波信号又是经过一系列的算法得到的,不免存在非谐和的搅扰;别的,在实践使用中,电网频率简直不行能精确地保持在50Hz,例如,若采样频率为fs=10kHz,电网频率f1=50Hz,则一个周期中简略地取N=fs/f1=200 时,当而电网频率不是严格地为50Hz 时,必然会带来非谐和 的的搅扰,跟着时刻的推移这样的逐点累加必然会发生错位,构成体系不安稳[2]- [5]。为了减小这种扰动,一种办法便是使C(z)的增益减小,使操控差错添加减小,但一起带来的问题是导致呼应缓慢及稳态精度的下降[11]。本文在C(z)的输出端添加一正比于差错的前馈量,使操控器能更快地呼应差错的改变;一起将传统的PI 操控引进操控之中,且由惯例的并联复合操控改为串联复合操控,使统的PI 操控不只在动态时起作用,而在稳态时也能够按捺搅扰信号的影响。改善的复合操控框图如图4 所示,PI 操控的引进,能够进一步减小C(z)及Q(z)的增益,使体系具有更强的鲁棒性,因为减小C(z)及Q(z)值而带来的操控精度的下降及呼应的缓慢,能够经过增大PI 的P 及前馈K来进步。

3.3 快速空间矢量算法
空间矢量脉宽调制(SVPWM)是把三相变流器的端部电压状况在复平面上综合为空间电压矢量,并经过不同的开关状况构成8 个空间矢量,使用这8 个空间矢量去迫临电压圆,然后构成SVPWM 波。它能在较低的开关频率下取得较好的谐波按捺作用和比SPWM高15%的基波电压,它的另一个长处是易于完成数字和实时操控。
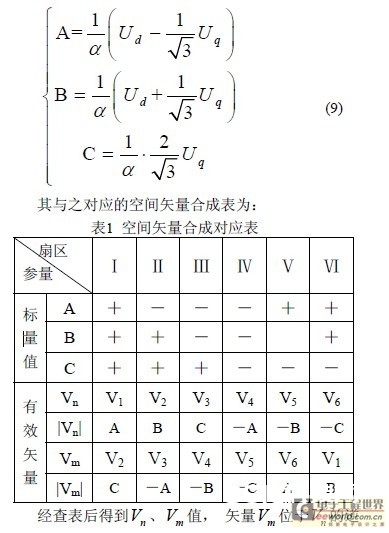
本文在D-Q坐标系下,使谐波参阅电流与反应电流进行比较,经PI+重复双闭环电流操控得到参阅电压信号。将D-Q坐标系下的电压参阅信号转换到A-B坐标系下,使用非标准正交基基底将其进行矢量分化[8],得到下式A、B、C 3个不同的标量值,能够依据这三个值查表1来确认参阅矢量所在的恣意区域及相邻的有用根本矢量的幅值:
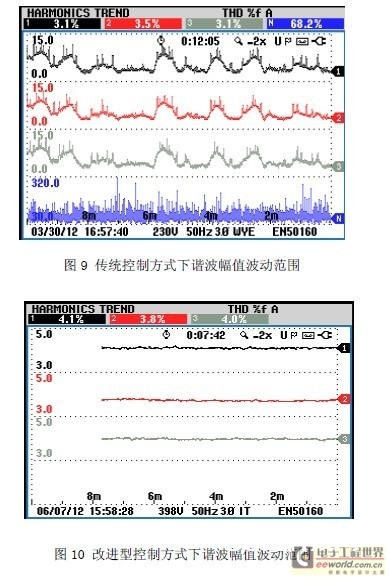
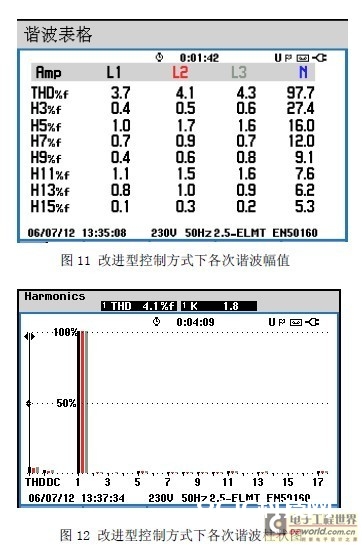
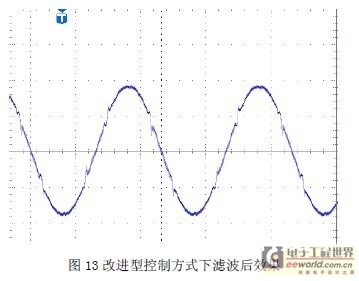
5 定论
本文在旋转d,q 坐标系中剖析了APF 的数学模型,树立了电压、电流解耦环节,对解耦后的d,q 轴电流id,iq 别离进行操控。为了减小非周期信号对操控的影响,在增强因为下降重复操控补偿增益而带来的呼应缓慢,提出了改善的重复操控与传统PI 操控相串联的双环操控算法。选用SVPWM 操控战略,在50A样机SAPF 进步行了试验,试验结果表明,改善的操控算法有很强的鲁棒性,能较大程度的较小非周期信号对操控作用的影响。