


在运动过程中,轮椅既需求承受用户的指令,又需结合环境信息发动本身避障、导航等功用模块,与移动机器人不同的是,在运用过程中,轮椅与用户成为一个协同作业的体系。这就要求在规划之初就把人这个要素归入考虑之中,所以,安全、舒适和简单操作应成为智能轮椅规划中最重要的要素;运用者身体才能的差异决议了智能轮椅需被规划为一个功用多元化,能满意多种层次需求的电子体系,而模块化最能体现体系多功用化的特征,每个用户都能依据其本身残障类型和程度挑选恰当的模块集成,且规划者可以在现有基础上经过增加功用模块,很方便地对轮椅功用进行改善。
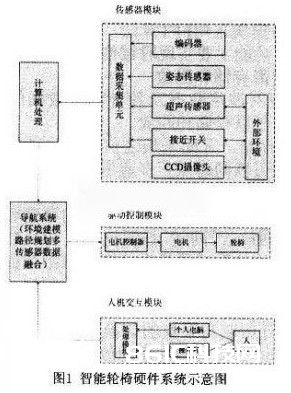
智能轮椅的总功用可以分为以下几个子功用:环境感知及导航功用、操控功用、驱动功用和人机交互功用。经过对智能轮椅的功用分析和模块区分,再结合详细的研讨内容和希望操控方针,本体系首要由传感器模块、驱动操控模块和人机交互模块3部分组成,硬件体系结构如图1所示。其间传感器模块首要有内部状况感知和外部环境感知两部分构成,经过姿势传感器确认轮椅本身的位姿信息;经过编码器的位移速度和间隔取得自定位信息;视觉、超声波和挨近开关首要担任继续取得周围环境和障碍物的间隔信息。驱动操控模块咱们选用后轮驱动的方法,每一个后轮装备一个电动机,在操控器的操作下完结电动轮椅的跋涉、撤退和转向。人机交互界面由操作杆和个人电脑界面数据输入两种方法,完结根本的人机交互功用。
智能轮椅有2个独立的驱动轮,各自装备一个电机码盘。由2个电机码盘的实时检测数据构成了里程计式的相对定位传感器,一起安装了倾角传感器和陀螺仪来丈量轮椅内跋涉过程中的姿势状况。超声波传感器和挨近开关被用于感知周围环境信息。为获取更大范围内的障碍物信息,本体系装备了8个红外传感器和8个超声波传感器。别的安装了一个CCD摄像头用于判别前方跋涉旅程中的深度信息。
可以只是依托两个轮子完结车体的平衡。这个明显特征要求它有特别的结构,根本的规划思想为:坚持两个轮子分别由独立的直流电动机驱动,并且在一条轴线上,车体的重心坚持在轮轴以上,运用检测车体歪斜视点的传感器实时地获取车体的姿势信息,机器人的处理器将传感器信号进行处理,依照必定的操控算法计算出操控量操控电动机的转速和转向,驱动机器人跋涉或撤退,完结车体的平衡。
智能轮椅选用一个倾角传感器和一个陀螺仪的组合构成姿势传感器来检测车体渠道的运转姿势。倾角传感器用来丈量轮椅违背竖直方向的视点,陀螺仪用来丈量角速度。






