


工业运动操控包括一系列运用,包括依据逆变器的电扇或泵操控、具有更为杂乱的沟通驱动操控的工厂自动化以及高档自动化运用(如具有高档伺服操控的机器人)。这些体系需求检测和反应多个变量,例如电机绕组电流或电压、直流链路电流或电压、转子方位和速度。在比如增值功用(如状况监控)等考虑要素中,终端运用需求、体系架构、方针体系本钱或体系杂乱度将决议变量的挑选和所需的丈量精度。据报道,电机占全球总能耗的40%,世界法规越来越重视整个工业运动运用的体系功率,因而,这些变量越来越重要,特别是电流和电压。
本文将依据电机额定功率、体系功用要求以及终端运用,要点评论各种电机操控信号链拓扑中的电流与电压检测。在此状况下,电机操控信号链的完成会因传感器挑选、电流阻隔要求、模数转化器(ADC)挑选、体系集成以及体系功耗和接地区分的不同而有所差异。
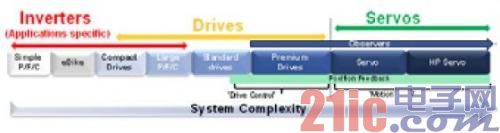
图1.工业驱动运用图谱
工业驱动器运用图谱
从简略的逆变器到杂乱的伺服驱动器,电机操控运用包括一系列电机类型,但一切电机均包括特定功率级的电机操控体系,以及具有不同等级的检测和反应,可驱动脉冲宽度调制器(PWM)模块的处理器。图1为运用图谱的简化图,展现了杂乱度从左至右逐步进步的各种体系,首先是简略的操控体系,如无需精细反应仅运用简略微处理器即可完成的泵、电扇和压缩机。跟着体系杂乱度的进步(即移向图谱的较高端),杂乱操控体系要求准确反应和高速通讯接口。例如带传感器或不带传感器的矢量操控感应电机或永磁电机,以及针对图1中所示功率而规划的高功率工业驱动器(如大型泵、电扇和压缩机)。图谱的最高端为杂乱的伺服驱动器,用于机器人、机床以及贴片机器等运用。跟着体系杂乱度的进步,变量的检测和反应变得越来越要害。
驱动器架构体系区分
咱们在规划满意各种工业运动操控运用需求的体系时或许会遇到各种问题。通用电机操控信号链如图2所示。

图2.通用电机操控信号链
阻隔要求非常重要,一般对发生的电路拓扑和架构具有明显影响。需求考虑两个要害要素:阻隔的原因和方位。
阻隔分类的要求取决于前者。或许要求高压安全阻隔(SELV)以防电击,或功用阻隔以便在非丧命电压之间进行电平转化,或为完成数据完整性并消除噪音而要求进行阻隔。阻隔方位一般由体系的预期功用决议。电机操控一般是在充满电噪声的恶劣环境中进行,选用的规划一般需接受数百伏的共模电压,或许会在超越20 kHz的频率下切换,并具有极高的瞬态dv/dt上升时间。为此,功用较高的体系和固有噪声较高的大功率体系一般会规划为具有与操控级相阻隔的功率级。不管是选用单处理器仍是双处理器规划都会影响阻隔方位。在功用较低的低功耗体系中,一般是在数字通讯接口上进行阻隔,这意味着功率级和操控级处于同一电位。低端体系需阻隔的通讯接口带宽较低。因为高端体系要求具有较高带宽,且传统阻隔技能具有局限性,因而,阻隔高端体系的通讯端口一般会比较困难。可是跟着磁性阻隔的CAN和RS-485收发器产品的面世,状况正在发生变化。
在高功用闭环电机操控规划中,两个要害的元件构成为PWM调制器输出和电机相位电流反应。图3a和图3b展现了需求进行安全阻隔的方位,具体方位取决于操控级是与功率级同享相同的电位仍是以接地为基准。不管何种状况,高端栅极驱动器和电流检测节点都需求阻隔,可是图3a中的阻隔等级不同,这些节点只需进行功用阻隔,而在图3b中,这些节点的人员安全阻隔(即电流阻隔)至关重要。
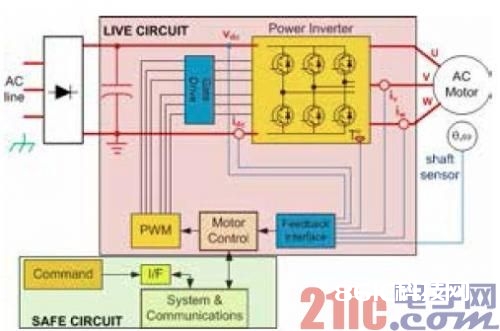
图3a.以功率级为基准的操控级
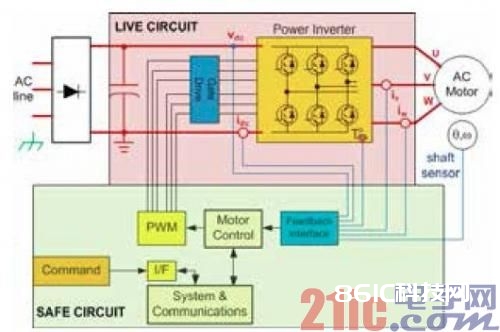
图3b.以接地为基准的操控级






